MATLAB中被控对象模型建立的几种方法 |
您所在的位置:网站首页 › matlab建立零极点模型函数 › MATLAB中被控对象模型建立的几种方法 |
MATLAB中被控对象模型建立的几种方法
|
1、 传递函数模型
首先将分子分母多项式用向量表示,然后利用MATLAB的控制系统工具箱中的tf函数建立传递函数模型,具体如下: 结果: G = 2 s + 1 --------------------- s^3 + 2 s^2 + 4 s + 1Continuous-time transfer function. 方法(2) 代码: s=tf('s'); %先定义Laplace算子 G=(2*s+1)/(s^3+2*s^2+4*s+1)结果: G = 2 s + 1 --------------------- s^3 + 2 s^2 + 4 s + 1 Continuous-time transfer function. 2、 零极点模型调用zpk(z,p,K)函数完成零极点函数模型的创建。 调用zpk(z,p,K)函数完成零极点函数模型的创建。 表1.3 zpk函数用法 结果: G1 = 4 (s+5)^2 -------------------------- (s+1) (s+2) (s^2 + 4s + 8) Continuous-time zero/pole/gain model.方法(2) 代码: s=zpk('s'); %定义算子 G2=4*(s+5)^2/(s+1)/(s+2)/(s^2+4*s+8)结果: G2 = 4 (s+5)^2 -------------------------- (s+1) (s+2) (s^2 + 4s + 8) Continuous-time zero/pole/gain model.方法2需要注意的是,对于共轭复数表示的零极点,需要展开成二阶多项式的形式。 3、 状态空间模型(1)由A,B,C,D矩阵直接创建状态控制模型 sys=ss(A,B,C,D)(2)对于离散的状态空间模型,需要设置采样时间Ts sys=ss(A,B,C,D,Ts)同样,也可以通过ssdata()函数来获得状态方程对象参数 [A,B,C,D]=ssdata(sys) 获得连续系统参数 [A,B,C,D,Ts]=ssdata(sys) 获得离散系统参数例1-3 利用ss命令创建以下状态空间模型 代码: A=[6 5 4;1 0 0;0 1 0]; %给状态矩阵A赋值 B=[1 0 0]; %给输入矩阵B赋值 C=[0 6 7]; %给输出矩阵C赋值 D=[0]; %给前馈矩阵D赋值 G=ss(A,B,C,D) %输入并显示系统状态空间模型结果: G = A = x1 x2 x3 x1 6 5 4 x2 1 0 0 x3 0 1 0 B = u1 x1 1 x2 0 x3 0 C = x1 x2 x3 y1 0 6 7 D = u1 y1 0 Continuous-time state-space model. 4、 模型之间的转化在实际的控制系统设计中,给出的模型跟我们需要的模型可能不是一种描述方式,所以MATLAB为我们提供了不同模型之间转换的函数。主要分为两大类,一类是将其他类型的模型转化成所需模型;另一种是将已有的模型转化成其他形式的模型。 表 1.5 将其他类型的模型转化成所需模型 |
 tf函数常用用法见下表: 表1.1 tf函数用法
tf函数常用用法见下表: 表1.1 tf函数用法 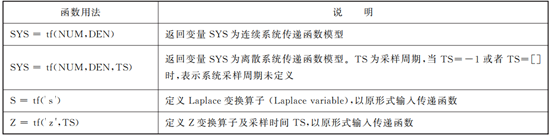 还有一些其他的相关函数如下: 表 1.2 MATLAB中构建传递函数相关函数
还有一些其他的相关函数如下: 表 1.2 MATLAB中构建传递函数相关函数 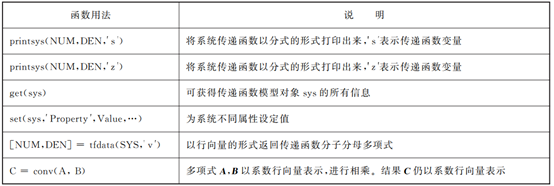 接下来举几个例子: 例1-1 利用MATLAB建立如下传递函数模型
接下来举几个例子: 例1-1 利用MATLAB建立如下传递函数模型 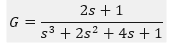 1)方法1 代码:
1)方法1 代码: 表1.4其他相关函数
表1.4其他相关函数  注意:当pamap函数有返回值时不在绘制零极点分布图 例1-2 试用MATLAB建立以下传递函数。
注意:当pamap函数有返回值时不在绘制零极点分布图 例1-2 试用MATLAB建立以下传递函数。  方法(1) 代码:
方法(1) 代码: 表1.6 将现有模型转化成其他类型的模型
表1.6 将现有模型转化成其他类型的模型 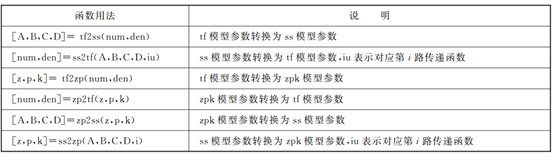
【本文地址】
今日新闻 |
推荐新闻 |