将solidworks机械臂模型导入Matlab |
您所在的位置:网站首页 › matlab导入三维模型 › 将solidworks机械臂模型导入Matlab |
将solidworks机械臂模型导入Matlab
|
将solidworks机械臂模型导入Matlab
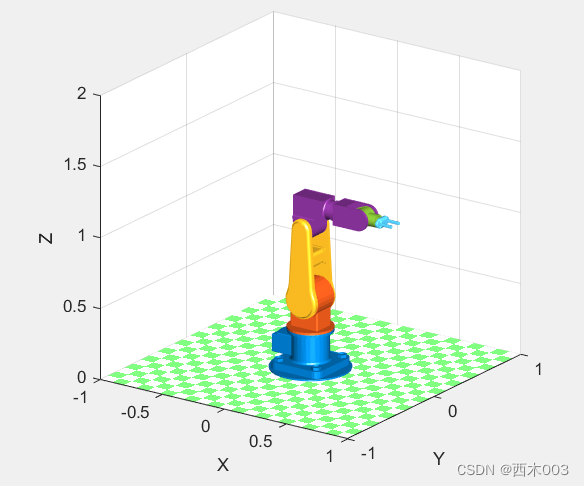
转STL文件导入Matlab最终效果
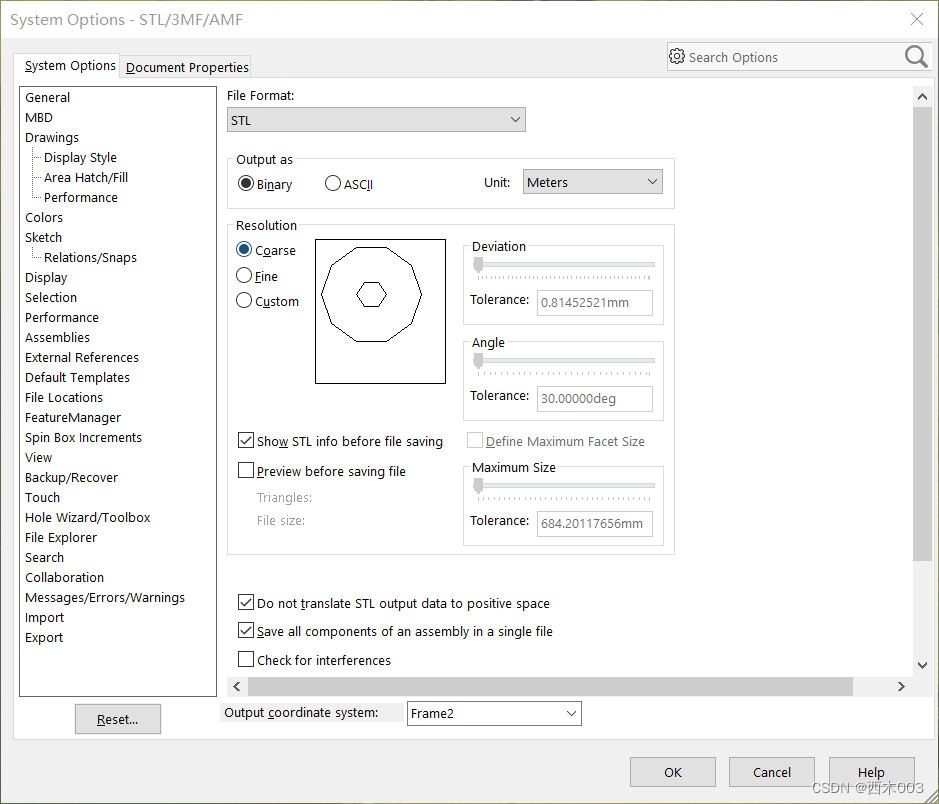
转STL文件
将SW中机械臂模型导入matlab中,需要先转成STL文件,最重要的设置选项如下所示,尤其注意下面勾选的两项,还有单位是meters。值得注意的是,基座的参考坐标是WordFrame,第一关节的参考坐标是frame1,此后依次类推fram2、3、4。 如果出现各个link没有连接上、连杆显示重叠、没有模型出现等等问题,都是该页面的设置问题(哭着踩了一堆坑)。 模型来源于: 链接:https://pan.baidu.com/s/1-mVAusSgzvr2tK45gShDhg 提取码:l6eg 所有关节转为STL文件之后利用plot3D函数导入。附上代码,其中path后是自己的模型绝对路径 clear all; close all; clc; L(1)=Link('revolute','d',0.216,'a',0,'alpha',pi/2); L(2)=Link('revolute','d',0,'a',0.5,'alpha',0,'offset',pi/2); L(3)=Link('revolute','d',0,'a',sqrt(0.145^2+0.42746^2),'alpha',0,'offset',-atan(427.46/145)); L(4)=Link('revolute','d',0,'a',0,'alpha',pi/2,'offset',atan(427.46/145)); L(5)=Link('revolute','d',0.258,'a',0,'alpha',0); Five_dof=SerialLink(L,'name','5-dof'); Five_dof.base=transl(0,0,0.28); % Five_dof.teach q0=[0 0 0 0 0]; v=[35 20]; w=[-1 1 -1 1 0 2]; Five_dof.plot3d(q0,'tilesize',0.1,'workspace',w,'path','D:\研究生资料\机械臂\Fdof','nowrist','view',v) light('Position',[1 1 1],'color','w');可参考该UP主的教程机器臂仿真模型 最终效果最终效果如下所示,可以在此基础上进行控制实现。 |
【本文地址】
今日新闻 |
推荐新闻 |