基于 Matlab 和 Truetime 的网络控制系统仿真 |
您所在的位置:网站首页 › matlab仿真介绍 › 基于 Matlab 和 Truetime 的网络控制系统仿真 |
基于 Matlab 和 Truetime 的网络控制系统仿真
|
一、实验目的 通过动手实践了解网络控制系统的架构及运行控制原理 熟悉使用基于 MATLAB 平台、Simulink 仿真工具和 TrueTime 工具箱的网络控制系统的仿真方法 考察不同丢包率下网络控制系统状态、输出和控制曲线的影响 研究丢包率对无线网络传输的网络控制系统的稳定性的影响 二、仿真平台构建Truetime 是瑞典隆德(Lund)大学自动化系 MartinOhin,Dan Henriksson 和 Anton Cervin 于 2002 年推出的基 于 MATLAB/Simulink 的网络控制系统仿真工具箱。针对每一特定的网络协议,该工具箱可以实现控制系统与实时调 度的综合仿真研究,是目前网络控制系统理想的虚拟仿真工具之一。 本次实验使用 Truetime2.0 工具箱的七大模块中的 TrueTime Kernel 模块和 TrueTime Wireless Network 模块。 其中,系统的传感器、执行器和控制器由 TrueTime Kernel 表示,无线网络由 TrueTime Wireless Network 表示。传感器采用时钟驱动的方式进行周期性采样,控制器和执行器采用事件驱动方式。 在确定各个功能模块之后,需要对各模块进行初始化,即初始化模块内核,定义消息函数并设置消息调度策略 和初始化网络端口并设置节点对应的网络端口代号。 三、实验步骤对于本次仿真实验,按照 Truetime 仿真流程,我将实验步骤分为三步:建立数学模型,功能模块图仿真和编写 相关代码。 3.1 建立数学模型这一部分简要重述该网络控制系统的数学模型。 已知直流电机的传递函数为:  该电机通过网络 IEEE 802.11b/g(WLAN)的方式进行远程控制,系统的控制结构如下图所示:  图 1 单闭环网络控制系统流程图 假设传感器采用时钟驱动的方式进行周期性采样,控制器和执行器采用事件驱动方式。存在网络丢包现象, 其状态空间模型可以描述成  其中初始状态为  ,p 为丢包概率,p=0 表示无数据丢包,p=1 表示有数据丢包,假设不会发生连续丢包。给定控制器为  。 3.2 功能模块图仿真这一部分主要介绍基于 Simulink 及 Truetime 工具箱的模块图绘制。通过理解 wireless 和 network 两个示例文 件,搭建本次实验的网络控制系统的功能模块图,如图 2 所示。  图 2 仿真系统功能模块图 其中,TrueTime Wireless Network 模块模拟了网络部分,可以更改丢包率(Loss Probability)这一参数。在 Regulator Node 中的 TrueTime Kernel 中,模拟了控制器从网络中接收 y(k),并生成 u(k),将 u(k)发送到网络中的过 程。在 Sensor/Actuator Node 的 TrueTime Kernel 中,模拟了传感器到控制器再到执行器节点的过程,执行器从网 络中接收控制信号 u(k);进行零阶保持;若丢包贼改成 u(k-1),若不丢包则改成 u(k);再通过状态转移及传输延迟 生成输出信号 y(k);再讲数字信号 y(k)发送至网络。如此形成闭环网络控制系统。仿真过程可参考图 3。 在搭建的过程中,依照数学模型的参数对部分模块的参数设置做出调整。  图 3 NCS 离散仿真流程图 3.3 编写相关代码通过研究 TrueTime 2.0-reference manual 及阅读 wireless 文件夹中的相关代码后,可将代码编写分为两个步骤 依次进行,模块初始化和编写任务代码。模块初始化针对控制器(Regulator)和执行器/传感器(Sensor/Actuator), 任务代码仅针对控制节点(Regulator Node)。 3.3.1 模块初始化对控制器(Regulator)和执行器/传感器(Sensor/Actuator)的初始化可直接参照 wireless 中的 regulator.m 文 件和 actuator_init.m 文件进行,无需改动。代码如下: function regulator_init % Distributed control system: regulator node % % Receives messages from the sensor node, computes control signal % and sends it back to the actuator node. 7. % Initialize TrueTime kernel ttInitKernel('prioFP'); % fixed priority ttSetKernelParameter('energyconsumption', 0.010); % 10 mW % Create mailboxes ttCreateMailbox('sensor_signal', 10) ttCreateMailbox('power_ping', 10) ttCreateMailbox('power_response', 10) 16. % Controller parameters h = 0.010; N = 100000; Td = 0.035; K = 1.5; % Create task data (local memory) data.u = 0.0; data.K = K; data.ad = Td/(N*h+Td); data.bd = N*K*Td/(N*h+Td); data.Dold = 0.0; data.yold = 0.0; % Create controller task deadline = h; prio = 1; ttCreateTask('pid_task', deadline, 'ctrlcode', data); ttSetPriority(prio, 'pid_task'); 36. % Create power controller task offset = 2; period = 0.025; prio = 2; power_data.transmitPower = 20; power_data.name = 2; % We are node number 2 in the network power_data.receiver = 1; % We are communicating with node 1 power_data.haverun = 0; % We have not run yet ttCreatePeriodicTask('power_controller_task', offset, period, 'powctrlcode', power_data); ttSetPriority(prio, 'power_controller_task'); 47. % Create power response task deadline = 100; prio = 3; ttCreateTask('power_response_task', deadline, 'powrespcode'); ttSetPriority(prio, 'power_response_task'); 53. % Initialize network ttCreateHandler('nw_handler', 1, 'msgRcvCtrl'); ttAttachNetworkHandler('nw_handler'); function actuator_init % Distributed control system: actuator node % % Receives messages from the controller and actuates % the plant. 7. % Initialize TrueTime kernel ttInitKernel('prioFP'); % fixed priority ttSetKernelParameter('energyconsumption', 0.010); % 10 mW 11. % Create mailboxes ttCreateMailbox('control_signal', 10) ttCreateMailbox('power_ping', 10) ttCreateMailbox('power_response', 10) 16. % Create sensor task data.y = 0; offset = 0.0; period = 0.010; prio = 1; ttCreatePeriodicTask('sens_task', offset, period, 'senscode', data); ttSetPriority(prio, 'sens_task'); % Create actuator task deadline = 100; prio = 2; ttCreateTask('act_task', deadline, 'actcode'); ttSetPriority(prio, 'act_task'); 30. % Create power controller task offset = 2.07; period = 0.025; prio = 3; power_data.transmitPower = 20; power_data.name = 1; % We are node number 1 in the network power_data.receiver = 2; % We are communicating with node 2 power_data.haverun = 0; % We have not run yet ttCreatePeriodicTask('power_controller_task', offset, period, 'powctrlcode', power_data); ttSetPriority(prio, 'power_controller_task'); % Create power response task deadline = 100; prio = 4; ttCreateTask('power_response_task', deadline, 'powrespcode'); ttSetPriority(prio, 'power_response_task'); % Initialize network ttCreateHandler('nw_handler', 1, 'msgRcvActuator'); ttAttachNetworkHandler('nw_handler');3.3.2 编写任务代码function [exectime, data] = ctrlcode(seg, data) 2. switch seg case 1 % Read all buffered packets temp = ttTryFetch('sensor_signal'); while ~isempty(temp) y = temp; temp = ttTryFetch('sensor_signal'); end if isempty(y) data.u = data.old; % 丢包,保持 u(k-1) else data.u = -0.005 * (y(1) + y(2)); % 不丢包,保持 u(k) end exectime = 0.0005; 17. case 2 msg.msg = data.u; msg.type = 'control_signal'; ttSendMsg(1, msg, 80); % Send 80 bits to node 1 (actuator) exectime = -1; % finished end四、实验结果分析4.1 不同丢包率下三条结果曲线当丢包率分别为 0.3 和 0.6 时系统状态曲线、输出曲线和控制曲线如图 4 和图 5 所示。显然,在丢包率为 0.3 和 0.6 时,系统是稳定的。  图 4 丢包率为 0.3 时,系统状态曲线、输出曲线和控制曲线  图 5 丢包率为 0.6 时,系统状态曲线、输出曲线和控制曲线 4.2 不同丢包率下稳定性分析根据上课讲解的 Bernoulli 过程的线性跳变系统,建立新的系统状态变量  由是否丢包情况下两种不同的控制率,即:  结合系统离散状态方程:  其中,  采样周期为 0.01s。 由 Lyapunov 稳定性判据可知, 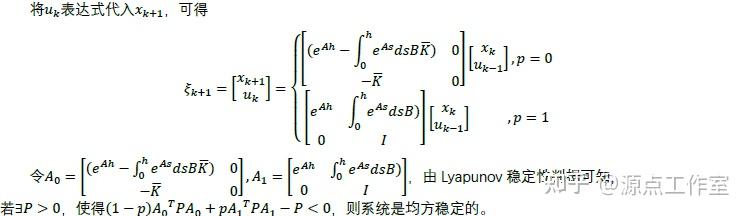 运用 LMI 工具箱对 P>0 进行求解,得到当丢包率大于等于 0.96 时,系统不满足均方稳定(MSS),当丢包率小于等于 0.95 时,系统是均方稳定的。 h=0.01; eAh=[1 1-exp(-h);0 exp(-h)]; A01=eAh-[h h+exp(-h)-1;0 1-exp(-h)]*[0;1000]*[0.005 0.005]; A0=[A01(1),A01(3),0;A01(2),A01(4),0;-0.005,-0.005,0]; tmp=[h h+exp(-h)-1;0 1-exp(-h)]*[0;1000]; A1=[eAh(1),eAh(3),tmp(1);eAh(2),eAh(4),tmp(2);0,0,1]; c=zeros(1,120); i=1; for p=0:0.01:1 setlmis([]); P=lmivar(1,[3,1]); lmiterm([-1,1,1,P],1,1);%P>0 lmiterm([2,1,1,P],(1-p)*A0',A0); lmiterm([2,1,1,P],p*A1',A1); lmiterm([2,1,1,P],-1,1); lmis=getlmis; [tmin,xfeas]=feasp(lmis); if tmin>0 c(i)=p; i=i+1; end %P=dec2mat(lmis,xfeas,P); end c为了观察不稳定情况下,系统状态曲线、输出曲线和控制曲线的走势,我重新设置丢包率为 0.98,这时三条曲 线走势如图 6 所示。  图 6 丢包率为 0.98 时,系统状态曲线、输出曲线和控制曲线 致谢由衷感谢认真负责的老师对本次实验前期理论知识的细致讲解,对实验的耐心介绍和答疑, 也感谢助教对配置仿真环境及实验过程中种种问题的耐心解答! |
【本文地址】