【路径规划】改进的人工势场算法机器人避障路径规划【含Matlab源码 1151期】 |
您所在的位置:网站首页 › matlab中的不等于怎么打 › 【路径规划】改进的人工势场算法机器人避障路径规划【含Matlab源码 1151期】 |
【路径规划】改进的人工势场算法机器人避障路径规划【含Matlab源码 1151期】
|
⛄一、简介
人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。 人工势场包括引力场合斥力场,其中目标点对物体产生引力,引导物体朝向其运动(这一点有点类似于A*算法中的启发函数h)。障碍物对物体产生斥力,避免物体与之发生碰撞。物体在路径上每一点所受的合力等于这一点所有斥力和引力的和。这里的关键是如何构建引力场和斥力场。下面我们分别讨论一下: 引力场: 常用的引力函数: 斥力场: 斥力就是斥力场的梯度 总的场就是斥力场合引力场的叠加,也就是U=U_att+U_rep,总的力也是对对应的分力的叠加,如下图所示: (b)当目标点附近有障碍物时,斥力将非常大,引力相对较小,物体很难到达目标点 (c)在某个点,引力和斥力刚好大小相等,方向想反,则物体容易陷入局部最优解或震荡 三、各种改进版本的人工势场法 (a)对于可能会碰到障碍物的问题,可以通过修正引力函数来解决,避免由于离目标点太远导致引力过大 相应斥力变成: (c)局部最优问题是一个人工势场法的一个大问题,这里可以通过加一个随机扰动,让物体跳出局部最优值。类似于梯度下降法局部最优值的解决方案。 ⛄二、部分源代码clear all; %障碍和目标,起始位置都已知的路径规划,意图实现从起点可以规划出一条避开障碍到达目标的路径。 %初始化车的参数 Xo=[0 0];% 起点位置 k=1000;% 计算引力需要的增益系数 %K=0;% 初始化 m=10;% 计算斥力的增益系数,都是自己设定的。 Po=1;%障碍影响距离,当障碍和车的距离大于这个距离时,斥力为0,即不受该障碍的影响。也是自己设定。 n=9;%障碍个数 a=0.5; l=0.1;% 步长 J=300;%循环迭代次数 r = 0.5; %如果不能实现预期目标,可能也与初始的增益系数, Po 设置的不合适有关。 %end %给出障碍和目标信息 Xsum=[10 10;1 1.5;3 2.2;4 4.5;3 6;6 2.5;5.5 6; 6 4.5;9 9;8.5 5];% 这个向量是(n+1)2 维,其中[10 10] 是目标位置,剩下的都是障碍的位置。 Xj=Xo;%j=1 循环初始,将车的起始坐标赋给Xj %************** 初始化结束,开始主体循环****************** for j=1:J% 循环开始 Goal(j,1)=Xj(1);%Goal 是保存车走过的每个点的坐标。刚开始先将起点放进该向量。 Goal(j,2)=Xj(2); %调用计算角度模块 Theta=compute_angle(Xj,Xsum,n);%Theta 是计算出来的车和障碍,和目标之间的与X 轴之间的夹角,统一规定角度为逆时针方向,用这个模块可以计算出来。 %调用计算引力模块 Angle=Theta(1);%Theta (1)是车和目标之间的角度,目标对车是引力。 angle_at=Theta(1);% 为了后续计算斥力在引力方向的分量赋值给angle_at [Fatx,Faty]=compute_Attract(Xj,Xsum,k,Angle,0,Po,n);% 计算出目标对车的引力在x,y 方向的两个分量值。 for i=1:n angle_re(i)=Theta(i+1);% 计算斥力用的角度,是个向量,因为有n 个障碍,就有n 个角度。 end %调用计算斥力模块 [Frerxx,Freryy,Fataxx,Fatayy]=compute_repulsion(Xj,Xsum,m,angle_at,angle_re,n,Po,a,r);%计算出斥力在x,y 方向的分量数组。 %计算合力和方向,这有问题,应该是数,每个j 循环的时候合力的大小应该是一个唯一的数,不是数组。应该把斥力的所有分量相加,引力所有分量相加。 Fsumyj=Faty+Freryy+Fatayy;%y 方向的合力 Fsumxj=Fatx+Frerxx+Fataxx;%x 方向的合力 Position_angle(j)=atan(Fsumyj/Fsumxj);% 合力与x 轴方向的夹角向量 %计算车的下一步位置 %保存车的每一个位置在向量中 Xj=Xnext; %判断 if ((Xj(1)-Xsum(1,1))>0)&((Xj(2)-Xsum(1,2))>0)% 是应该完全相等的时候算作到达, 还是只是接近就可以?现在按完全相等的时候编程。 K=j % 记录迭代到多少次,到达目标。 break; %记录此时的j 值 end%如果不符合if 的条件,重新返回循环,继续执行。end%大循环结束 K=j; Goal(K,1)=Xsum(1,1);% 把路径向量的最后一个点赋值为目标 Goal(K,2)=Xsum(1,2); %*********************************** 画出障碍, 起点, 目标, 路径点************************* %画出路径 %路径向量Goal 是二维数组,X,Y 分别是数组的x,y 元素的集合,是两个一维数组。 x=[1 3 4 3 6 5.5 6 9 8.5];% 障碍的x 坐标 y=[1.5 2.2 4.5 6 2.5 6 4.5 9 5]; plot(10,10,‘v’,0,0,‘ms’,X,Y ,‘-k’,‘linewidth’,3); Pathkm = Kl %斥力计算 function [Yrerxx,Yreryy,Yataxx,Yatayy]=compute_repulsion(X,Xsum,m,angle_at,angle_re,n,Po,a,r)% 输入参数为当前坐标, Xsum 是目标和障碍的坐标向量,增益常数,障碍,目标方向的角度 Rat=(X(1)-Xsum(1,1))2+(X(2)-Xsum(1,2))2;% 路径点和目标的距离平方 rat=sqrt(Rat);% 路径点和目标的距离 for i=1:n Rrei(i)=(X(1)-Xsum(i+1,1))2+(X(2)-Xsum(i+1,2))2;% 路径点和障碍的距离平方 rre(i)=sqrt(Rrei(i))-r;% 路径点和障碍的距离保存在数组rrei 中 R0=(Xsum(1,1)-Xsum(i+1,1))2+(Xsum(1,2)-Xsum(i+1,2))2; r0=sqrt(R0)-r; if rre(i)>Po% 如果每个障碍和路径的距离大于障碍影响距离,斥力令为0 Yrerx(i)=0; Yrery(i)=0; Yatax(i)=0; Yatay(i)=0; else %if r0Xsum(i+1,2) Yrer(i)=m(1/rre(i)-1/Po)((1/rre(i))^2)(rat);% 分解的Fre1 向量 Yata(i)=am((1/rre(i)-1/Po)2)*(rata);% 分解的Fre2 向量 Yrerx(i)=-Yrer(i)cos(angle_re(i));%angle_re(i)=Y(i+1) Yrery(i)=1Yrer(i)sin(angle_re(i)); Yatax(i)=Yata(i)cos(angle_at);%angle_at=Y(1) Yatay(i)=Yata(i)sin(angle_at); else Yrer(i)=m(1/rre(i)-1/Po)((1/rre(i))^2)Rat;% 分解的Fre1 向量 Yata(i)=am((1/rre(i)-1/Po)^2)*rat;% 分解的Fre2 向量 Yrerx(i)=Yrer(i)*cos(angle_re(i));%angle_re(i)=Y(i+1) Yrery(i)=Yrer(i)*sin(angle_re(i)); Yatax(i)=Yata(i)*cos(angle_at);%angle_at=Y(1) Yatay(i)=Yata(i)*sin(angle_at); end end end%判断距离是否在障碍影响范围内end Yrerxx=sum(Yrerx);% 叠加斥力的分量 Yreryy=sum(Yrery); Yataxx=sum(Yatax); Yatayy=sum(Yatay); ⛄三、运行结果
1 matlab版本 2014a 2 参考文献 [1]焦阳.基于改进蚁群算法的无人机三维路径规划研究[J].舰船电子工程. 2019,39(03) 3 备注 简介此部分摘自互联网,仅供参考,若侵权,联系删除 |
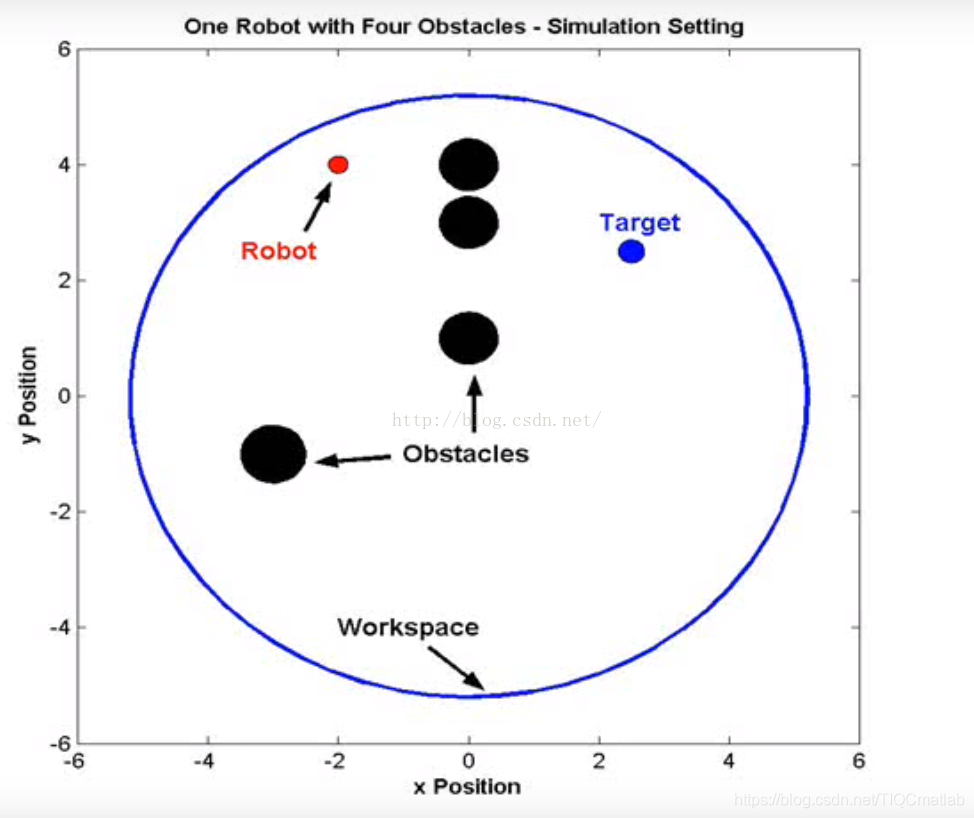 如图所示,机器人在一个二维环境下运动,图中指出了机器人,障碍和目标之间的相对位置。
如图所示,机器人在一个二维环境下运动,图中指出了机器人,障碍和目标之间的相对位置。 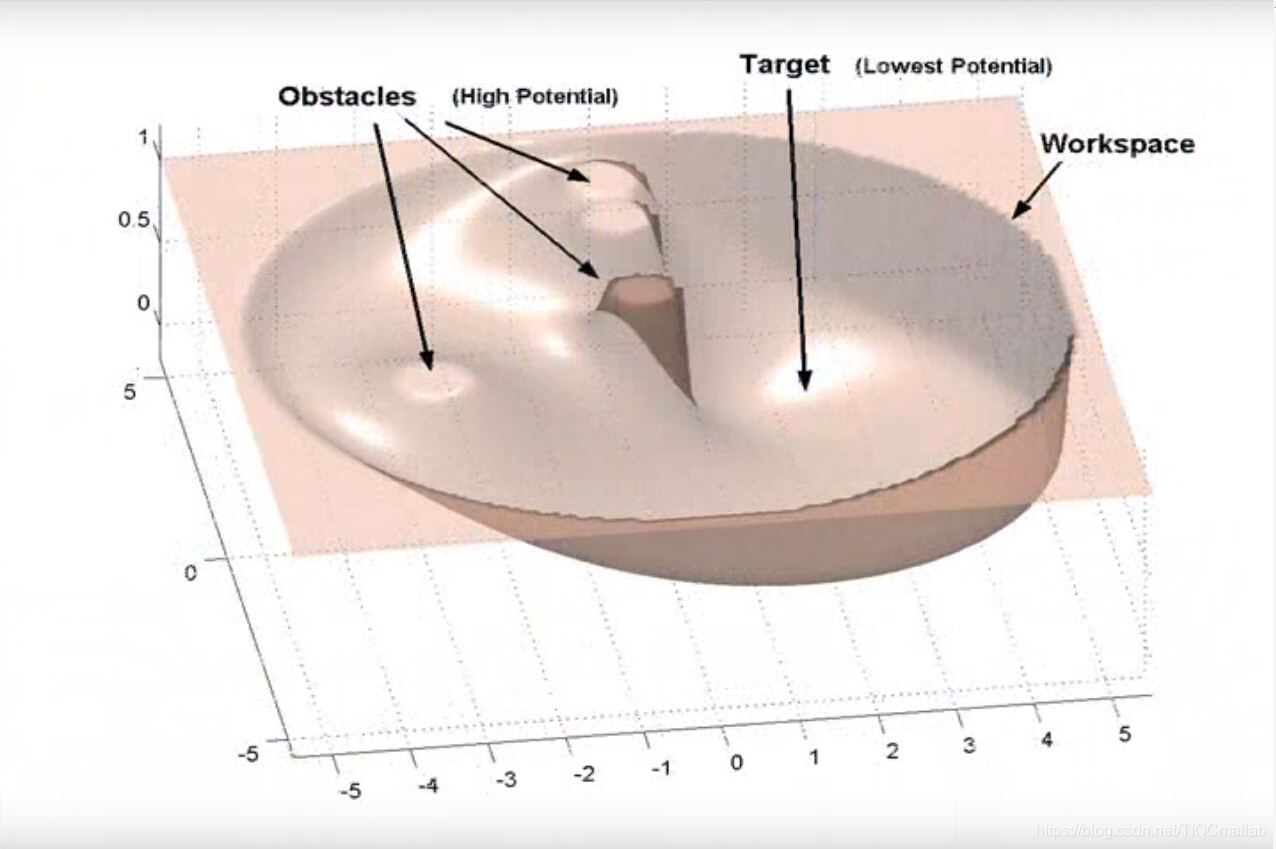 这个图比较清晰的说明了人工势场法的作用,物体的初始点在一个较高的“山头”上,要到达的目标点在“山脚”下,这就形成了一种势场,物体在这种势的引导下,避开障碍物,到达目标点。
这个图比较清晰的说明了人工势场法的作用,物体的初始点在一个较高的“山头”上,要到达的目标点在“山脚”下,这就形成了一种势场,物体在这种势的引导下,避开障碍物,到达目标点。 这里的ε是尺度因子.ρ(q,q_goal)表示物体当前状态与目标的距离。引力场有了,那么引力就是引力场对距离的导数(类比物理里面W=FX):、
这里的ε是尺度因子.ρ(q,q_goal)表示物体当前状态与目标的距离。引力场有了,那么引力就是引力场对距离的导数(类比物理里面W=FX):、  关于梯度的算法可以参考相关资料,简单提一下,二元函数梯度是酱紫的[δx,δy],这个符号是偏导数,不太对,见谅。
关于梯度的算法可以参考相关资料,简单提一下,二元函数梯度是酱紫的[δx,δy],这个符号是偏导数,不太对,见谅。 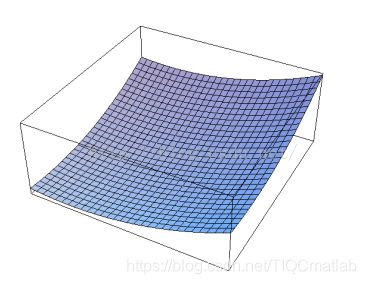 Fig .引力场模型
Fig .引力场模型 公式(3)是传统的斥力场公式,现在还没有搞清楚是怎么推导出来的。公式中η是斥力尺度因子,ρ(q,q_obs)代表物体和障碍物之间的距离。ρ_0代表每个障碍物的影响半径。换言之,离开一定的距离,障碍物就对物体没有斥力影响。
公式(3)是传统的斥力场公式,现在还没有搞清楚是怎么推导出来的。公式中η是斥力尺度因子,ρ(q,q_obs)代表物体和障碍物之间的距离。ρ_0代表每个障碍物的影响半径。换言之,离开一定的距离,障碍物就对物体没有斥力影响。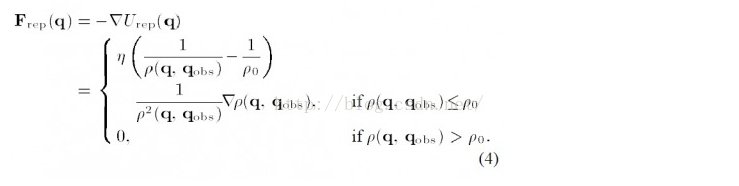
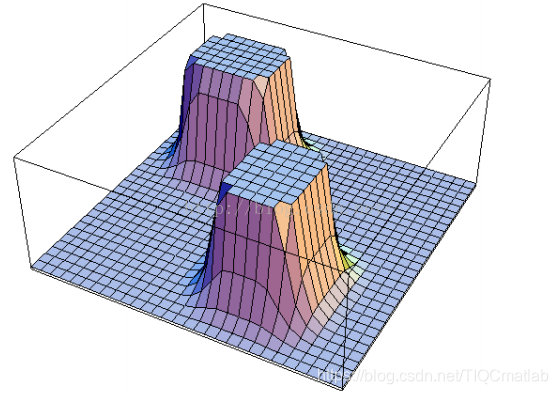 Fig 斥力场模型
Fig 斥力场模型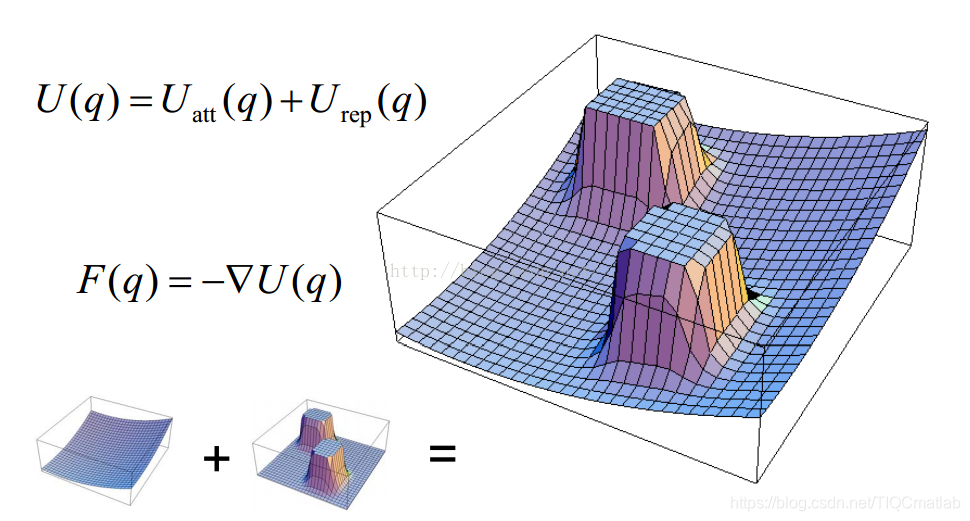 二、存在的问题 (a) 当物体离目标点比较远时,引力将变的特别大,相对较小的斥力在甚至可以忽略的情况下,物体路径上可能会碰到障碍物
二、存在的问题 (a) 当物体离目标点比较远时,引力将变的特别大,相对较小的斥力在甚至可以忽略的情况下,物体路径上可能会碰到障碍物 和(1)式相比,(5)式增加了范围限定。d*_goal 给定了一个阈值限定了目标和物体之间的距离。对应的梯度也就是引力相应变成:
和(1)式相比,(5)式增加了范围限定。d*_goal 给定了一个阈值限定了目标和物体之间的距离。对应的梯度也就是引力相应变成:  (b)目标点附近有障碍物导致目标不可达的问题,引入一种新的斥力函数
(b)目标点附近有障碍物导致目标不可达的问题,引入一种新的斥力函数  这里在原有斥力场的基础上,加上了目标和物体距离的影响,(n是正数,我看到有篇文献上n=2)。直观上来说,物体靠近目标时,虽然斥力场要增大,但是距离在减少,所以在一定程度上可以起到对斥力场的拖拽作用
这里在原有斥力场的基础上,加上了目标和物体距离的影响,(n是正数,我看到有篇文献上n=2)。直观上来说,物体靠近目标时,虽然斥力场要增大,但是距离在减少,所以在一定程度上可以起到对斥力场的拖拽作用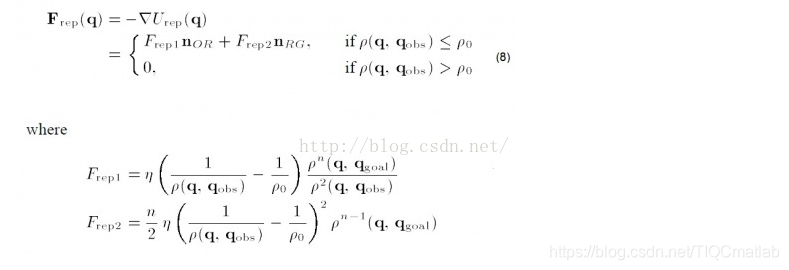 所以可以看到这里引力分为两个部分,编程时要格外注意
所以可以看到这里引力分为两个部分,编程时要格外注意
【本文地址】
今日新闻 |
推荐新闻 |