UVW平台介绍以及运动控制算法 |
您所在的位置:网站首页 › l1l2l3和uvw的关系 › UVW平台介绍以及运动控制算法 |
UVW平台介绍以及运动控制算法
|
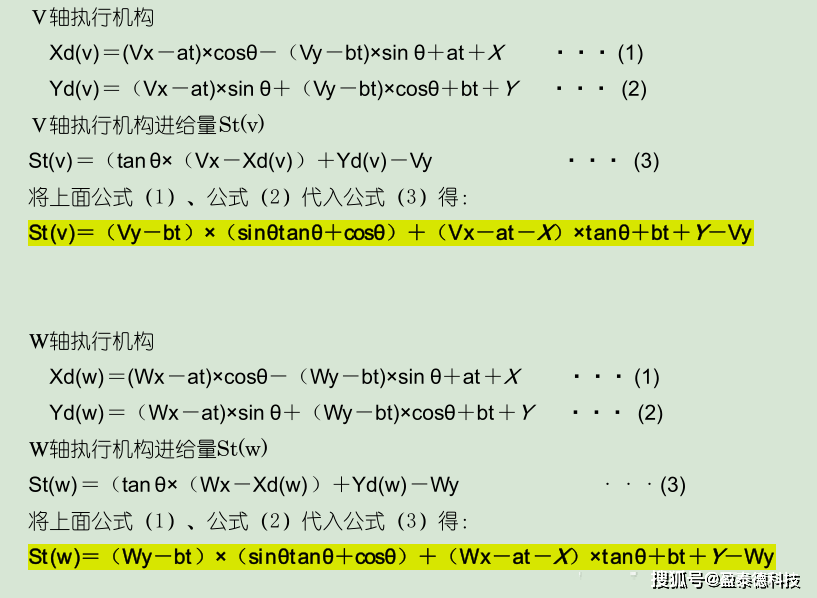
简单说明一下视觉对位和运动控制思路: 1、通过UVW平台供应商提供的说明书,找到机械参数,得到UVW三个轴的初始坐标(基于UVW平台原点坐标系); 2、通过视觉标定方法,确定相机坐标系到UVW平台坐标系的转换矩阵;确定标志物模板基于UVW平台原点坐标系的坐标值(x_m, y_m); 3、通过相机得到标志物模板位置和待纠偏标志物之间的x、y、θ偏移量(基于UVW平台原点坐标系); 4、按照上图公式,输入三个轴初始坐标,设置旋转中心为(0,0),输入θ偏移量,可得到UVW三轴新的坐标值,以及待纠偏物体的新的坐标,以及三个电机对应的给进量A1、A2、A3; 5、输入上一步求得的UVW三轴新的坐标值,另外通过上一步求得的待纠偏物体的新的坐标,计算得此时待纠偏物体到模板点位置的x2、y2偏移量;输入x2、y2偏移量,则可以得到三个电机对应给进量B1、B2、B3; 6、将5和6步获取的三个电机的给进量对应相加,分别得到对应电机给进量C1、C2、C3,并用此给进量驱动对应电机即可。即是,将运动过程拆解,变成平移和旋转部分,分别计算电机给进量。返回搜狐,查看更多 |
【本文地址】