KUKA 机器人练习:制作一条报警信息! |
您所在的位置:网站首页 › kuka机器人报警代码手册 › KUKA 机器人练习:制作一条报警信息! |
KUKA 机器人练习:制作一条报警信息!
|
枚举数据类型EKrlMsgType ENUM EKrlMsgType Notify, State, Quit,Waiting
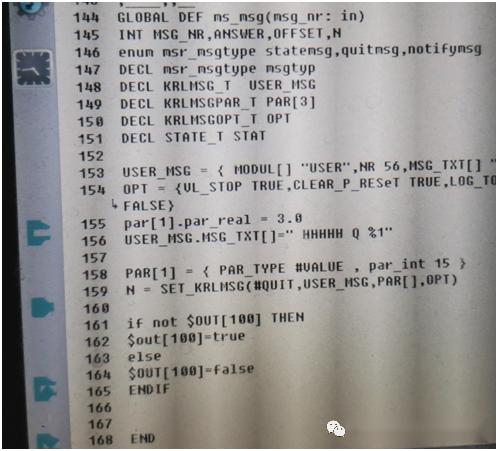
#Quit : 将该信息提示作为确认信息发出 #STATE: 将该信息提示作为状态信息发出 #NOTIFY :将该信息提示作为提示信息发出 #WAITING: 将该信息提示作为等待信息发出 信息文本中的变量%1,%2,%3 因此,需要3 组参数。每组参数由KUKA 结构KrlMsgPar_T 构成: Enum KrlMsgParType_T Value, Key, Empty STRUC KrlMsgPar_T KrlMsgParType_T Par_Type,CHAR Par_txt[26], INT Par_Int, REAL Par_Real, BOOL Par_Bool 例如: DECLKrlMsgPar_T Par[3] Par[1] = {Par_type #Value, Par_Int 15 } Par_Type : 参数/ 通配符的类型 #VALUE : 参数直接以传递的形式代入信息文本中(即作为字符串、INT 、REAL 或BOOL 值) #KEY: 该参数是一个为载入相应的文本用于在信息提示数据库中进行查找的关键词 #EMPTY : 参数是空的。 Par_txt[26] : 参数的文字或关键词 Par_Int: 将一个整数值作为参数传递 Par_Real : 将一个实数值作为参数传递 Par_Bool : 将一个布尔值作为参数传递,显示的文字为TRUE 或FALSE 练习:在USR_S 中编辑一个Ms_msg 的程序 然后通过: 中断程序触发. GLOBALINTERRUPTDECL26WHEN$IN[100] ==true DOms_msg INTERRUPT ON 26
----------------------end---------------------------- 每天进步一点点 Make small but daily progress返回搜狐,查看更多 |

【本文地址】
今日新闻 |
推荐新闻 |