LM(Levenberg–Marquardt)算法原理及其python自定义实现 |
您所在的位置:网站首页 › islmbp是什么模型 › LM(Levenberg–Marquardt)算法原理及其python自定义实现 |
LM(Levenberg–Marquardt)算法原理及其python自定义实现
|
LM算法原理及其python自定义实现
LM(Levenberg–Marquardt)算法原理LM算法python实现实现步骤:代码:运行结果:
LM(Levenberg–Marquardt)算法原理
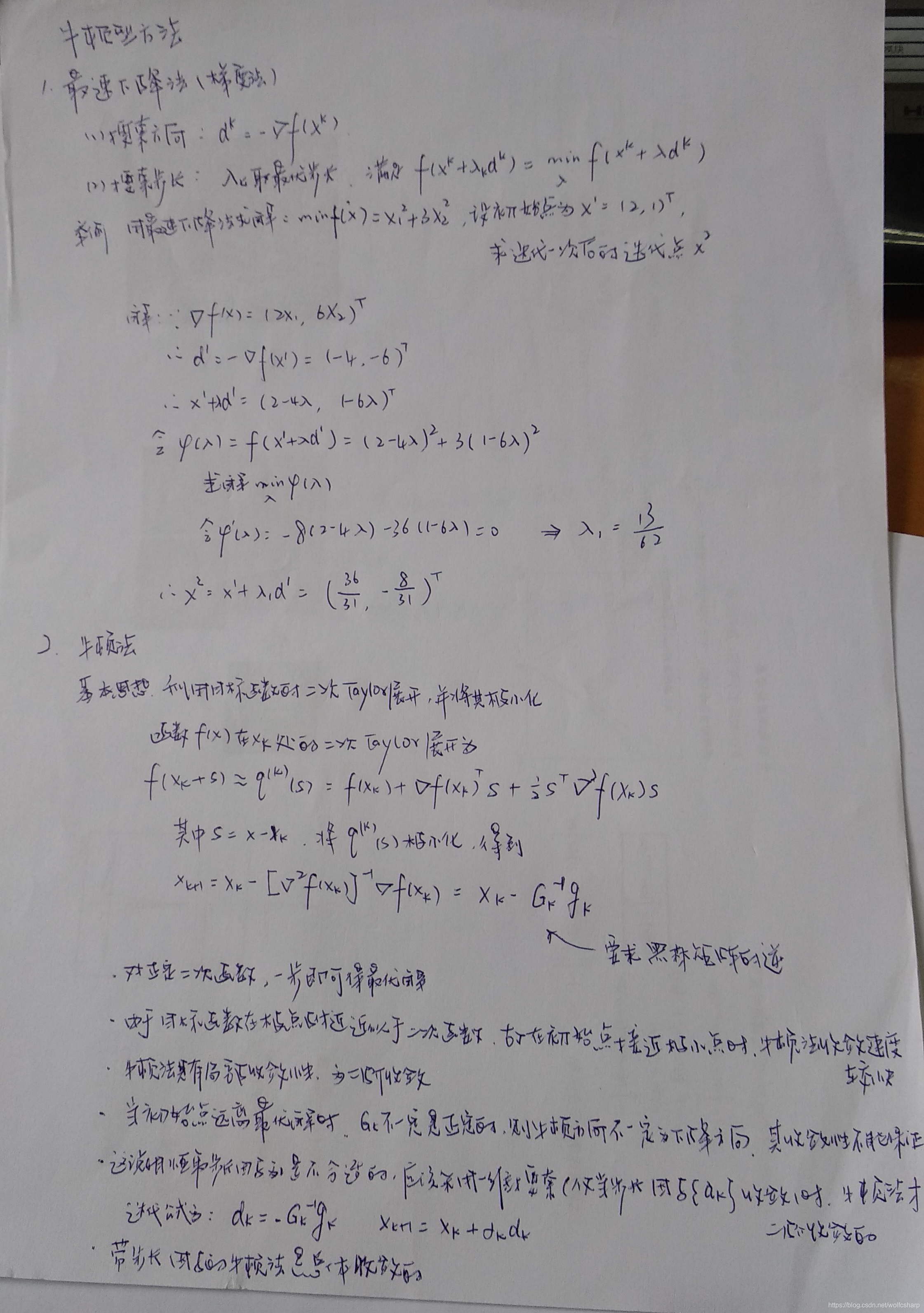
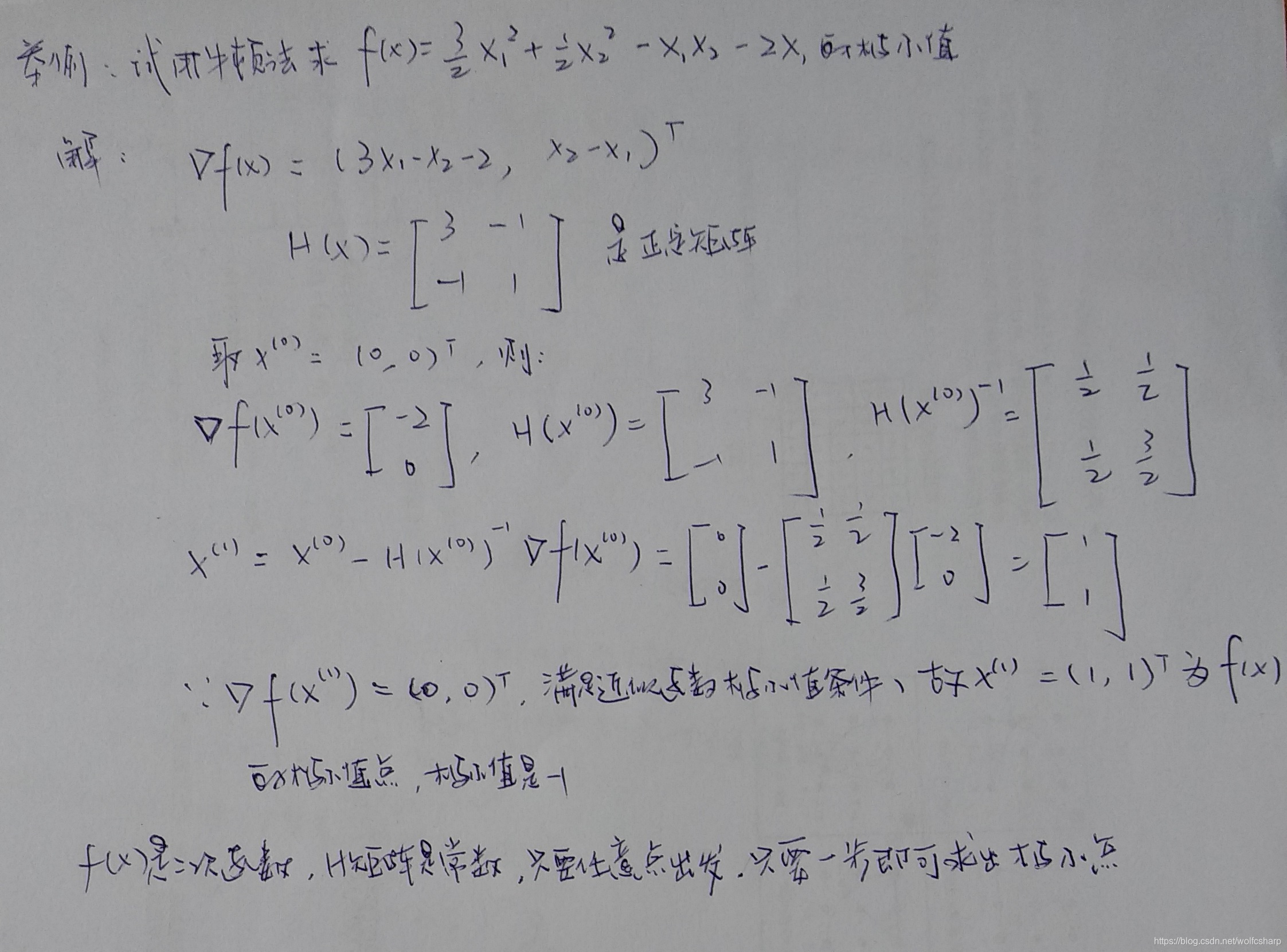
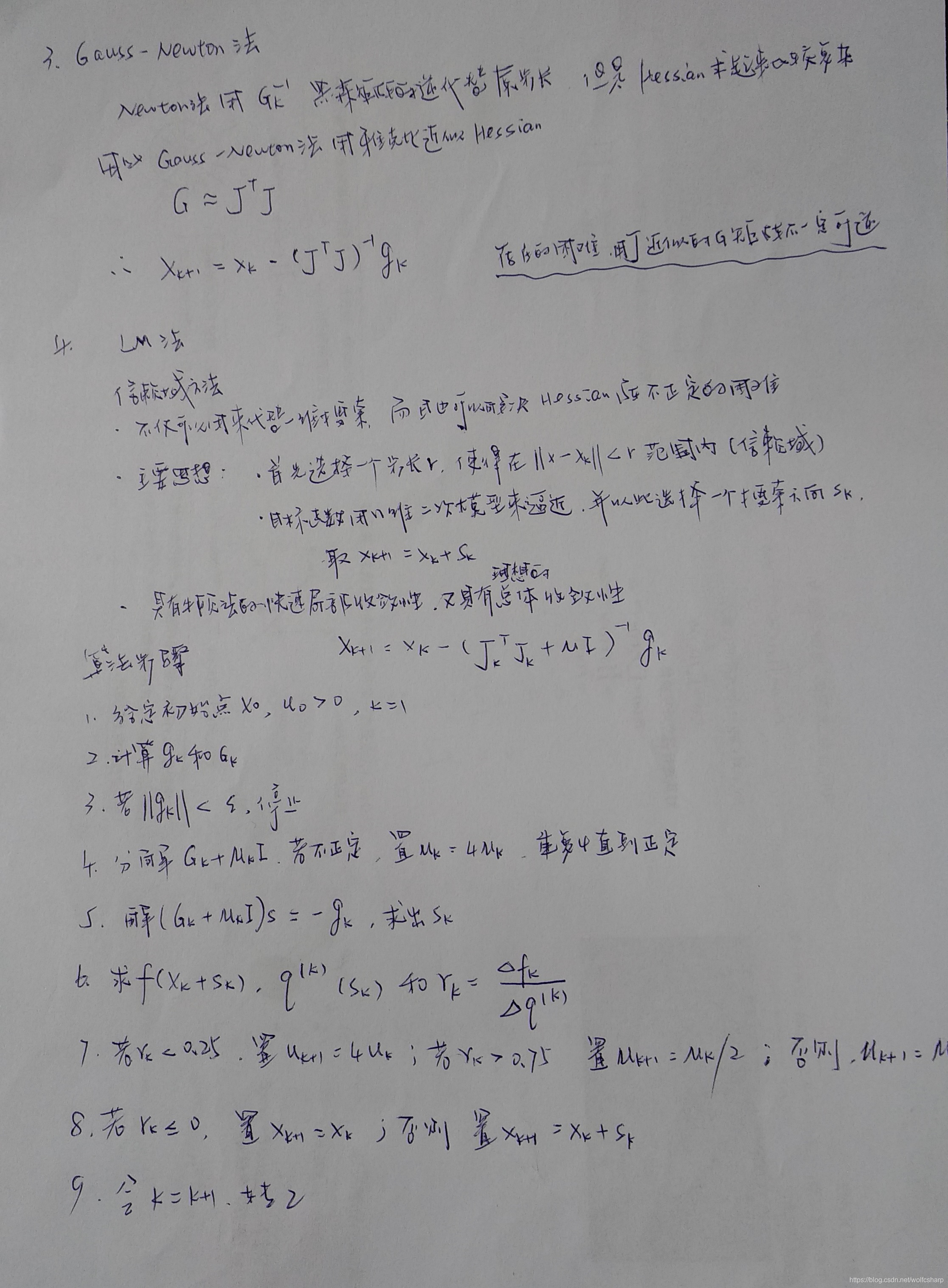
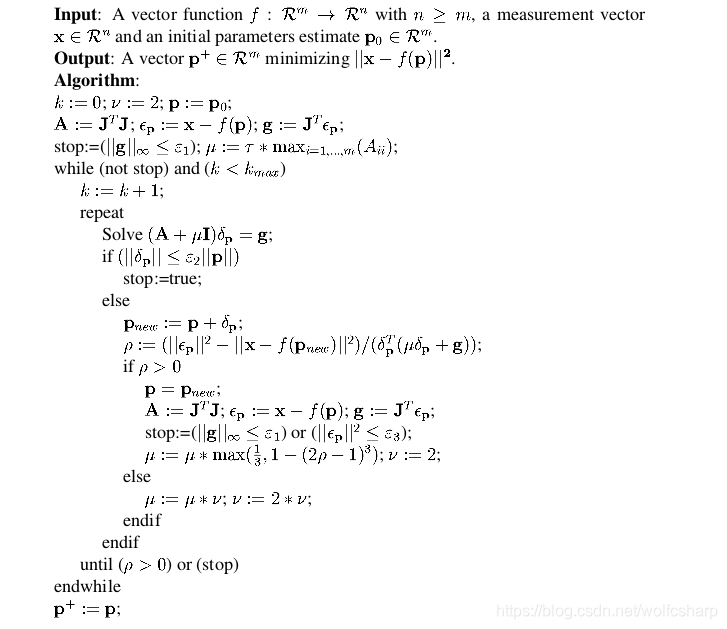
LM算法作为非线性优化的“标准”方法,算法的数学原理有很多优秀的参考资料。我看过这些参考资料之后,觉得再重新写一遍已经是无力且多余的事情了。我简单说明一下这些参考资料,然后贴上自己的手写笔记。 参考资料: 1.《Methods for non-linear least squares problems》这本书将非线性最小二乘问题的优化方法讲了一大通,非常值得一看。因为LM算法是从Gauss-Newton方法演进来的,而Gauss-Newton方法又是从Newton方法演进过来的,所以追根溯源应该从Newton法开始看起。而比Newton法更简洁的就是最速下降法了,这本书将所有的非线性优化问题讲了个底朝天,聪明人仔细读一读不吃亏。 2.A Brief Description of the Levenberg-Marquardt Algorithm Implemened by levmar 如果说上面那本书是准备好给搞理论看的版本的话,那这篇文章一定就是准备好给工程师看的了,文章对LM算法的实现给出了很好的讲解,工程师读一下,醍醐灌顶就可以写代码了。 3.[blog]原理及C++实现:Levenberg–Marquardt算法学习 4.[blog]原理及matlab实现:Levenberg-Marquardt 5.[blog]另一篇python实现:Python 算例实现Levenberg-Marquardt算法 6.我的笔记,你可以放心略过的部分:)D 在LM算法原理中提到的参考资料提供了一些算法实现的伪代码,但是他们略有不同,主要的不同点是在公式表述以及u、v的更新比率上有小的差异。 我运行过他们的部分代码,发现优化效果也能够快速收敛,并不影响实际效果。 我按照文章A Brief Description of the Levenberg-Marquardt Algorithm Implemened by levmar中的步骤,重新写了python代码,代码实现步骤如下: 1.我随机产生了100个input_data,设定正确的参数a和b,然后按照我要拟合的公式a×np.exp(b×input_data)加上一些高斯噪声计算出了100个对应的output_data, 作为观察。 2.初始化参数a和b,使之不要与真实值太离谱 3.用LM算法对其优化拟合,画出拟合曲线和迭代误差曲线。 ''' #Implement LM algorithm only using basic python #Author:Leo Ma #For csmath2019 assignment4,ZheJiang University #Date:2019.04.28 ''' import numpy as np import matplotlib.pyplot as plt #input data, whose shape is (num_data,1) #data_input=np.array([[0.25, 0.5, 1, 1.5, 2, 3, 4, 6, 8]]).T #data_output=np.array([[19.21, 18.15, 15.36, 14.10, 12.89, 9.32, 7.45, 5.24, 3.01]]).T tao = 10**-3 threshold_stop = 10**-15 threshold_step = 10**-15 threshold_residual = 10**-15 residual_memory = [] #construct a user function def my_Func(params,input_data): a = params[0,0] b = params[1,0] #c = params[2,0] #d = params[3,0] return a*np.exp(b*input_data) #return a*np.sin(b*input_data[:,0])+c*np.cos(d*input_data[:,1]) #generating the input_data and output_data,whose shape both is (num_data,1) def generate_data(params,num_data): x = np.array(np.linspace(0,10,num_data)).reshape(num_data,1) # 产生包含噪声的数据 mid,sigma = 0,5 y = my_Func(params,x) + np.random.normal(mid, sigma, num_data).reshape(num_data,1) return x,y #calculating the derive of pointed parameter,whose shape is (num_data,1) def cal_deriv(params,input_data,param_index): params1 = params.copy() params2 = params.copy() params1[param_index,0] += 0.000001 params2[param_index,0] -= 0.000001 data_est_output1 = my_Func(params1,input_data) data_est_output2 = my_Func(params2,input_data) return (data_est_output1 - data_est_output2) / 0.000002 #calculating jacobian matrix,whose shape is (num_data,num_params) def cal_Jacobian(params,input_data): num_params = np.shape(params)[0] num_data = np.shape(input_data)[0] J = np.zeros((num_data,num_params)) for i in range(0,num_params): J[:,i] = list(cal_deriv(params,input_data,i)) return J #calculating residual, whose shape is (num_data,1) def cal_residual(params,input_data,output_data): data_est_output = my_Func(params,input_data) residual = output_data - data_est_output return residual ''' #calculating Hessian matrix, whose shape is (num_params,num_params) def cal_Hessian_LM(Jacobian,u,num_params): H = Jacobian.T.dot(Jacobian) + u*np.eye(num_params) return H #calculating g, whose shape is (num_params,1) def cal_g(Jacobian,residual): g = Jacobian.T.dot(residual) return g #calculating s,whose shape is (num_params,1) def cal_step(Hessian_LM,g): s = Hessian_LM.I.dot(g) return s ''' #get the init u, using equation u=tao*max(Aii) def get_init_u(A,tao): m = np.shape(A)[0] Aii = [] for i in range(0,m): Aii.append(A[i,i]) u = tao*max(Aii) return u #LM algorithm def LM(num_iter,params,input_data,output_data): num_params = np.shape(params)[0]#the number of params k = 0#set the init iter count is 0 #calculating the init residual residual = cal_residual(params,input_data,output_data) #calculating the init Jocobian matrix Jacobian = cal_Jacobian(params,input_data) A = Jacobian.T.dot(Jacobian)#calculating the init A g = Jacobian.T.dot(residual)#calculating the init gradient g stop = (np.linalg.norm(g, ord=np.inf) |
【本文地址】
今日新闻 |
推荐新闻 |