GNSS原理与应用第六周作业 |
您所在的位置:网站首页 › gps测量在实际工作中可分为 › GNSS原理与应用第六周作业 |
GNSS原理与应用第六周作业
|
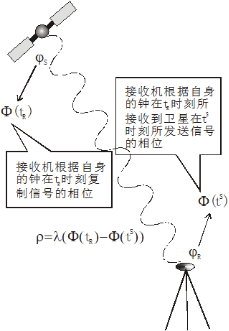
1.简述GPS载波相位测量的基本原理 2.在高精度GPS测量工作中,为什么需要采用载波相位测量方法进行三维定位3.载波相位测量中确定整周未知数主要有哪些方法?
2.高精度的GPS测量必须采用载波相位观测值,RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不到一秒钟。流动站可处于静止状态,也可处于运动状态;可在固定点上先进行初始化后再进入动态作业,也可在动态条件下直接开机,并在动态环境下完成周模糊度的搜索求解。在整周末知数解固定后,即可进行每个历元的实时处理,只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果。 RTK技术的关键在于数据处理技术和数据传输技术,RTK定位时要求基准站接收机实时地把观测数据(伪距观测值,相位观测值)及已知数据传输给流动站接收机,数据量比较大,一般都要求9600的波特率,这在无线电上不难实现。 3.整周模糊度确定的方法 •用伪距值来确定 •用较精确的卫星星历和先验站坐标来确定 •通过平差计算加以确定 (1)用伪距观测值来确定整周模糊度
(3)通过平差计算加以确定 将模糊度作为待定参数与坐标参数等一起通过平差计算来进行估算是确定模糊度的一种常用方法。 • 基线计算中的整数解和实数解 ✓ 实数解/浮点解:当整周模糊度参数取实数时的基线向量 ✓ 整数解/固定解:当整周模糊度参数取整数时的基线向量 • 实数解 • 短基线:两站所受到误差的相关性好,误差能较完善的得 以消除,模糊度参数容易固定,通常能获得固定解 • 中长基线:误差相关性减弱,误差随之增大,模糊度参数 很难固定,一般采用实数解 • 求整数解过程: ①求初始解 • 确定基线向量和模糊度未知数的实数解 ②将整周模糊度固定为整数 • 可迭代进行 ③求固定解 • 将整数模糊度作为已知值代入法方程重新求解 模糊度固定的常用方法 • FARA算法:快速模糊度解算法 • LAMBDA算法:最小二乘模糊度降相关平差法 |


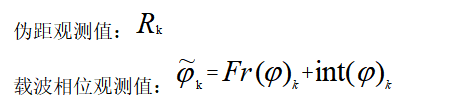 在不考虑各种误差的情况下(其中为载波波长,n为历元数)
在不考虑各种误差的情况下(其中为载波波长,n为历元数)  该方法的成功与否及所需的时间与伪距测量的精度密切相关。
该方法的成功与否及所需的时间与伪距测量的精度密切相关。
【本文地址】
今日新闻 |
推荐新闻 |