FlyThings3D 数据集浅析 |
您所在的位置:网站首页 › flying是什么运动 › FlyThings3D 数据集浅析 |
FlyThings3D 数据集浅析
|
FlyThings3D 数据集浅析
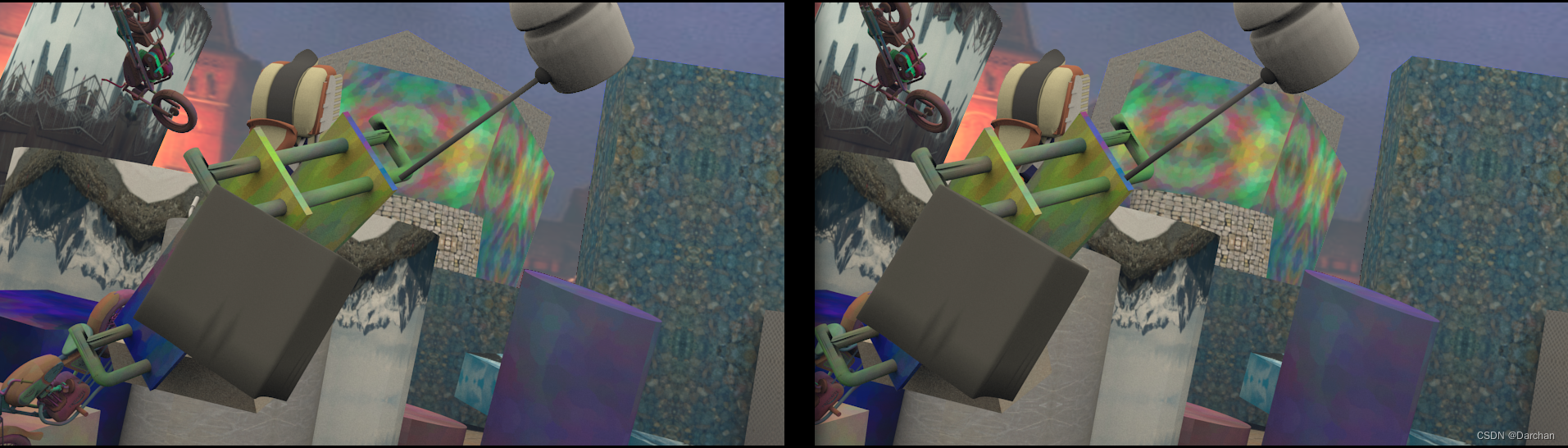
参考:数据官方地址 一. 概要数据集合包含超过 39000 个立体帧,分辨率为 960x540 像素,由各种合成序列渲染而成。 主要包含三个子集:FlyingThings3D、Driving、Monkaa。本文主要阐述FlyingThings3D,以下简称为F3D。 数据主要包含左、右两个视野(Left View和Right View),主要的内容有: RGB立体渲染对(RGB stereo renderings): 渲染图像有 cleanpass 和 finalpass 版本(后者更逼真,但在处理上难度也更大,例如运动模糊和景深)。 这两个版本都可以下载为无损 PNG 或高质量有损 WebP 图像。分割(Segmentations): 物体层面和材质层面两种光流图(Optical flow maps):光流描述了像素如何在图像之间移动(连续帧之间)。视差图(Disparity maps):这里的视差描述了像素如何在立体帧的两个视图之间移动。 它是一种深度表达,独立于相机内参(尽管它取决于立体装置的配置),并且可以看作是光流的一种特殊情况。视差变化图(Disparity change maps):单独的视差仅对单个立体帧有效。在图像序列中,像素差异随时间而变化。 这种视差变化数据填补了仅使用光流和静态视差时出现的场景流空白。运动边界(Motion boundaries):运动边界将图像划分为具有显着不同运动的区域, 可用于更好地判断算法在不连续处的性能。相机数据(Camera data):包含每一个立体帧的内参和外参数据。 二. 样本包目录结构,与概述中一一对应,RGB图片如下。 ├── camera_data.txt # 只有相机到世界坐标系的外参 ├── disparity │ ├── 0006.pfm │ ├── 0007.pfm │ └── 0008.pfm ├── disparity_change │ ├── 0006.pfm │ ├── 0007.pfm │ └── 0008.pfm ├── material_index │ ├── 0006.pfm │ ├── 0007.pfm │ └── 0008.pfm ├── motion_boundaries │ ├── 0006.pgm │ ├── 0007.pgm │ └── 0008.pgm ├── object_index │ ├── 0006.pfm │ ├── 0007.pfm │ └── 0008.pfm ├── optical_flow │ ├── backward │ │ ├── 0006.pfm │ │ ├── 0007.pfm │ │ └── 0008.pfm │ └── forward │ ├── 0006.pfm │ ├── 0007.pfm │ └── 0008.pfm └── RGB_cleanpass ├── left │ ├── 0006.png │ ├── 0007.png │ └── 0008.png └── right ├── 0006.png ├── 0007.png └── 0008.png 11 directories, 28 files
关于视差。 以左视图视差图为例,在像素位置p的视差值等于该像素在右图上的匹配点的列坐标减去其在左图上的列坐标 |
【本文地址】
今日新闻 |
推荐新闻 |