STM32+JR6001语音播报 |
您所在的位置:网站首页 › flash密码锁 › STM32+JR6001语音播报 |
STM32+JR6001语音播报
|
文章目录 前言一、JR6001怎么用?二、使用步骤 1.合成语音2.STM32代码总结 前言 最近在做一个利用STM32最小系统实现语音播报的小项目,加入到智能家居远程控制系统中,用来提示上位机对应操作的播报,于是就选择了JR6001作为语音播报模块,接下来就是学习过程。 提示:以下是本篇文章正文内容,下面案例可供参考 一、JR6001怎么用?首先使用JR6001模块,就先要从模块的资料中获取信息,话不多说,上链接!!! 链接: https://pan.baidu.com/s/1IYiga8Af0XBrcd2ONAGTrw?pwd=qwer 提取码: qwer 当然,如果想要快速了解JR6001模块,可以移步到CSDN博主「顾城沐心」的文章 原文链接:https://blog.csdn.net/m0_56051805/article/details/125116764 二、使用步骤 1.合成语音JR6001语音播报模块有内置4MB内存(插入USB连接PC即可弹出U盘),足够做项目使用。
接下来就是合成想要实现播报的语音,就要用到JR6001资料包里的语音合成软件,使用方法资料包里也有(资料包-语音合成软件-使用说明),就不详细展开介绍了。根据使用手册使用语音合成软件即可,自己动手操作!!!
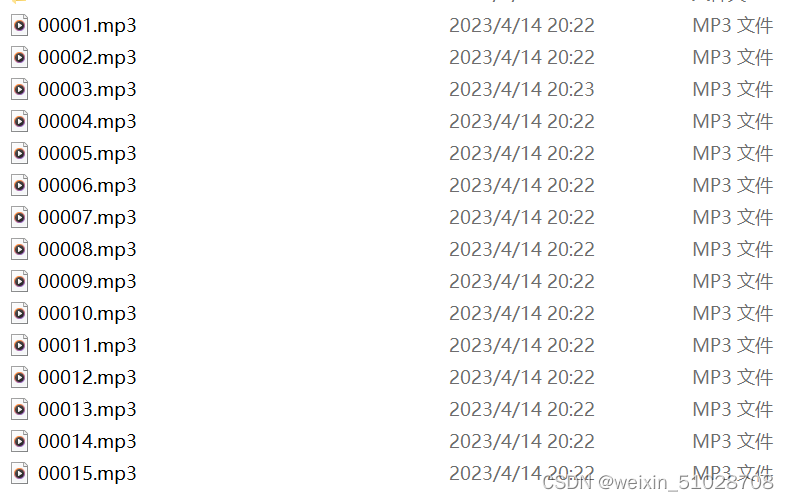
合成后的语音格式是.wav格式,我们还想要将其转换成.mp3格式。当然,JR6001资料包里还有MP3格式转换器(资料包-MP3格式转换器-使用说明图),使用方式如下图所示。 最后就是将转换后的语音.mp3格式,存放在JR6001内置U盘里,并正确按顺序命名。文件编号必须是按照以下顺序存放,例如00001···00011 ,才能保证发送正确指令(其它命名试过,不能正常使用)。
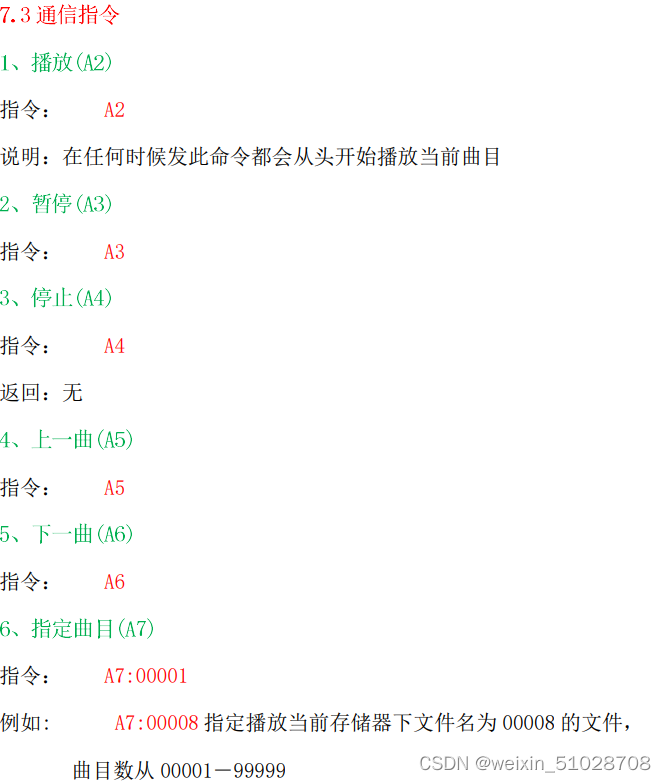
通过JR6001使用手册可以了解到,使用串口发送指令可以实现语音模块的播报,在项目中主要通过 6、指定曲目(A7),实现对应语音播报。
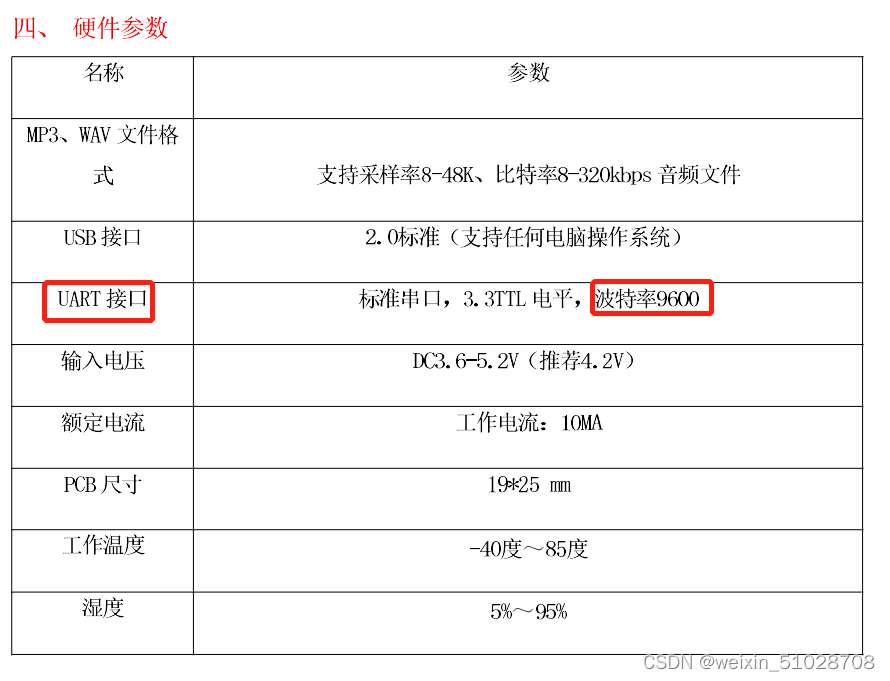
代码如下: 串口定义了三个,自行选择(本次以USART3为例),需要注意的是要定义发送字符串,部分串口例程里没有定义,这里需要注意(因为“A7:00001”是以字符串的形式发送)。 void USART_SendString(USART_TypeDef* USARTx, char *DataString) { int i = 0; USART_ClearFlag(USARTx,USART_FLAG_TC);//发送字符前清空标志位(否则缺失字符串的第一个字符) while(DataString[i] != '\0') //字符串结束符 { USART_SendData(USARTx,DataString[i]); //每次发送字符串的一个字符 while(USART_GetFlagStatus(USARTx,USART_FLAG_TC) == 0); //等待数据发送成功 USART_ClearFlag(USARTx,USART_FLAG_TC); //发送字符后清空标志位 i++; } }usart.c #include "sys.h" #include "usart.h" //如果使用ucos,则包括下面的头文件即可. #if SYSTEM_SUPPORT_OS #include "includes.h" //ucos 使用 #endif #if 1 #pragma import(__use_no_semihosting) //标准库需要的支持函数 struct __FILE { int handle; }; FILE __stdout; //定义_sys_exit()以避免使用半主机模式 _sys_exit(int x) { x = x; } //重定义fputc函数 int fputc(int ch, FILE *f) { while((USART1->SR&0X40)==0);//循环发送,直到发送完毕 USART1->DR = (u8) ch; return ch; } #endif #if EN_USART1_RX //如果使能了接收 //串口1中断服务程序 //注意,读取USARTx->SR能避免莫名其妙的错误 u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节. //接收状态 //bit15, 接收完成标志 //bit14, 接收到0x0d //bit13~0, 接收到的有效字节数目 u16 USART1_RX_STA=0; //接收状态标记 void uart1_init(u32 bound){ //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 //USART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9 //USART1_RX GPIOA.10初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //USART 初始化设置 USART_InitStructure.USART_BaudRate = bound;//串口波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(USART1, ENABLE); //使能串口1 } void USART1_IRQHandler(void) //串口1中断服务程序 { u8 Res; #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS. OSIntEnter(); #endif if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) { Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART1_RX_STA&0x8000)==0)//接收未完成 { if(USART1_RX_STA&0x4000)//接收到了0x0d { if(Res!=0x0a)USART1_RX_STA=0;//接收错误,重新开始 else USART1_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(Res==0x0d)USART1_RX_STA|=0x4000; else { USART1_RX_BUF[USART1_RX_STA&0X3FFF]=Res ; USART1_RX_STA++; if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;//接收数据错误,重新开始接收 } } } } #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS. OSIntExit(); #endif } #endif #if EN_USART2_RX u8 USART2_RX_BUF[USART2_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 u16 USART2_RX_STA = 0; //接收状态标记 void uart2_init(u32 bound) { GPIO_InitTypeDef GPIO_InitStrue; USART_InitTypeDef USART_InitStrue; NVIC_InitTypeDef NVIC_InitStrue; // 外设使能时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); USART_DeInit(USART2); //复位串口2 -> 可以没有 // 初始化 串口对应IO口 TX-PA2 RX-PA3 GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP; GPIO_InitStrue.GPIO_Pin=GPIO_Pin_2; GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStrue); GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING; GPIO_InitStrue.GPIO_Pin=GPIO_Pin_3; GPIO_Init(GPIOA,&GPIO_InitStrue); // 初始化 串口模式状态 USART_InitStrue.USART_BaudRate=bound; // 波特率 USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None; // 硬件流控制 USART_InitStrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; // 发送 接收 模式都使用 USART_InitStrue.USART_Parity=USART_Parity_No; // 没有奇偶校验 USART_InitStrue.USART_StopBits=USART_StopBits_1; // 一位停止位 USART_InitStrue.USART_WordLength=USART_WordLength_8b; // 每次发送数据宽度为8位 USART_Init(USART2,&USART_InitStrue); USART_Cmd(USART2,ENABLE);//使能串口 USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);//开启接收中断 // 初始化 中断优先级 NVIC_InitStrue.NVIC_IRQChannel=USART2_IRQn; NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE; NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1; NVIC_InitStrue.NVIC_IRQChannelSubPriority=1; NVIC_Init(&NVIC_InitStrue); } void USART2_IRQHandler(void) // 串口2中断服务函数 { u8 res; if(USART_GetITStatus(USART2,USART_IT_RXNE)) // 中断标志 { res= USART_ReceiveData(USART2); // 串口2 接收 // USART_SendData(USART2,res); // 串口2 发送 if((USART2_RX_STA&0x8000)==0)//接收未完成 { if(USART2_RX_STA&0x4000)//接收到了0x0d { if(res!=0x0a)USART2_RX_STA=0;//接收错误,重新开始 else USART2_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(res==0x0d)USART2_RX_STA|=0x4000; else { USART2_RX_BUF[USART2_RX_STA&0X3FFF]=res ; USART2_RX_STA++; if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//接收数据错误,重新开始接收 } } } } } #endif #if EN_USART3_RX u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 u16 USART3_RX_STA = 0; //接收状态标记 void uart3_init(u32 bound) { NVIC_InitTypeDef NVIC_InitStructure; GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //串口3时钟使能 USART_DeInit(USART3); //复位串口3 //USART3_TX PB10 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10 //USART3_RX PB11 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB11 USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART3, &USART_InitStructure); //初始化串口 3 USART_Cmd(USART3, ENABLE); //使能串口 //使能接收中断 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断 //设置中断优先级 NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 USART3_RX_STA=0; //清零 } void USART3_IRQHandler(void) // 串口3中断服务函数 { u8 res; if(USART_GetITStatus(USART3,USART_IT_RXNE)) // 中断标志 { res= USART_ReceiveData(USART3); // 串口3 接收 // USART_SendData(USART2,res); // 串口3 发送 if((USART3_RX_STA&0x8000)==0)//接收未完成 { if(USART3_RX_STA&0x4000)//接收到了0x0d { if(res!=0x0a)USART3_RX_STA=0;//接收错误,重新开始 else USART3_RX_STA|=0x8000; //接收完成了 } else //还没收到0X0D { if(res==0x0d)USART3_RX_STA|=0x4000; else { USART3_RX_BUF[USART2_RX_STA&0X3FFF]=res ; USART3_RX_STA++; if(USART3_RX_STA>(USART3_REC_LEN-1))USART3_RX_STA=0;//接收数据错误,重新开始接收 } } } } } void USART_SendString(USART_TypeDef* USARTx, char *DataString) { int i = 0; USART_ClearFlag(USARTx,USART_FLAG_TC); //发送字符前清空标志位(否则缺失字符串的第一个字符) while(DataString[i] != '\0') //字符串结束符 { USART_SendData(USARTx,DataString[i]); //每次发送字符串的一个字符 while(USART_GetFlagStatus(USARTx,USART_FLAG_TC) == 0); //等待数据发送成功 USART_ClearFlag(USARTx,USART_FLAG_TC); //发送字符后清空标志位 i++; } } #endifusart.h #ifndef __USART_H #define __USART_H #include "stdio.h" #include "sys.h" #define USART1_REC_LEN 200 //定义最大接收字节数 200 #define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收 extern u8 USART1_RX_BUF[USART1_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 extern u16 USART1_RX_STA; //接收状态标记 void uart1_init(u32 bound); #define USART2_REC_LEN 200 //定义最大接收字节数 200 #define EN_USART2_RX 1 //使能(1)/禁止(0)串口2接收 extern u8 USART2_RX_BUF[USART2_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 extern u16 USART2_RX_STA; //接收状态标记 void uart2_init(u32 bound); #define USART3_REC_LEN 200 //定义最大接收字节数 200 #define EN_USART3_RX 1 //使能(1)/禁止(0)串口2接收 extern u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 extern u16 USART3_RX_STA; //接收状态标记 void uart3_init(u32 bound); void USART_SendString(USART_TypeDef* USARTx, char *DataString); #endifmain.c #include "delay.h" #include "sys.h" #include "stdio.h" #include "usart.h" int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2 // uart1_init(9600); //串口1初始化波特率为9600 // uart2_init(9600); //串口2初始化波特率为9600 uart3_init(9600); //串口3初始化波特率为9600 delay_init(); //延时初始化 USART_SendString(USART3, "A7:00001\r\n"); delay_ms(10); while(1) { USART_SendString(USART3, "A7:00002\r\n"); delay_ms(10); } }需要注意的是,串口波特率的设置必须与JR6001的波特率一致(9600)
接下来就是动手实践了,不懂的也可以直接下载程序源码(评论区留言发送)。当然,根据上面操作也是可以实现的,还是自己动手来的更有意义。 随便蹭一下“五一定制限量奖章”,真的很帅!!! |

【本文地址】
今日新闻 |
推荐新闻 |