RT |
您所在的位置:网站首页 › finsh词组 › RT |
RT
|
文章目录
1、FinSH组件介绍1.1 FinSH 支持的功能1.2 FinSH 支持两种输入模式1.3 自定义 msh 命令1.3 FinSH 功能配置
2、FinSH组件原理介绍2.1 finsh shell的结构2.2 FinSH线程2.3 FinSH 的输入2.4 FinSH 的输出2.4.1 创建并注册串口设备:2.4.2 打开串口设备:
1、FinSH组件介绍
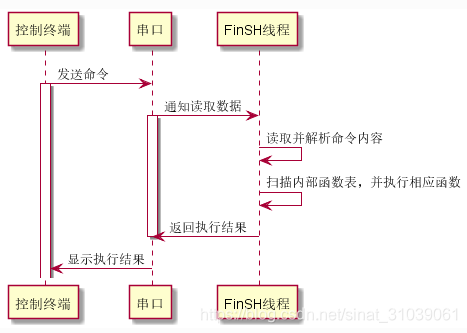
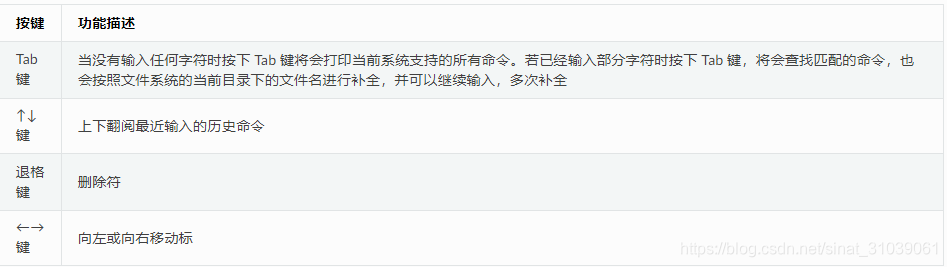
FinSH 是 RT-Thread 的命令行组件,提供一套供用户在命令行调用的操作接口,主要用于调试或查看系统信息。它可以使用串口 / 以太网 / USB 等与 PC 机进行通信。 用户在控制终端输入命令,控制终端通过串口、USB、网络等方式将命令传给设备里的 FinSH,FinSH 会读取设备输入命令,解析并自动扫描内部函数表,寻找对应函数名,执行函数后输出回应,回应通过原路返回,将结果显示在控制终端上。 当使用串口连接设备与控制终端时,FinSH 命令的执行流程,如下图所示: FinSH 支持自动补全、查看历史命令等功能,通过键盘上的按键可以很方便的使用这些功能,FinSH 支持的按键如下表所示: FinSH 支持两种输入模式,分别是传统命令行模式和 C 语言解释器模式。 C 语言解释器模式又称为C-Style 模式,C-Style 模式在运行脚本或者程序时不太方便,而使用传统的 shell 方式则比较方便。另外,C-Style 模式下,FinSH 占用体积比较大。RT-Thread默认只开启传统命令行模式。此文只介绍传统命令行模式。 传统命令行模式: 此模式又称为 msh(module shell),msh 模式下,FinSH 与传统shell(dos/bash)执行方式一致,例如,可以通过 cd / 命令将目录切换至根目录。 msh 通过解析,将输入字符分解成以空格区分开的命令和参数。其命令执行格式如下所示: command [arg1] [arg2] […] 其中 command 既可以是 RT-Thread 内置的命令,也可以是可执行的文件。 1.3 自定义 msh 命令自定义的 msh 命令,可以在 msh 模式下被运行,将一个命令导出到 msh 模式可以使用如下宏接口: MSH_CMD_EXPORT(name, desc); 参数描述name要导出的命令desc导出命令的描述导出无参数命令时,函数的入参为 void,示例如下: void hello(void) { rt_kprintf("hello RT-Thread!\n"); } MSH_CMD_EXPORT(hello , say hello to RT-Thread);系统运行起来后,在 FinSH 控制台按 tab 键可以看到导出的命令: msh /> RT-Thread shell commands: hello - say hello to RT-Thread version - show RT-Thread version information list_thread - list thread ……运行 hello 命令,运行结果如下所示: msh />hello hello RT_Thread! msh />导出有参数的命令时,函数的入参为 int argc 和 char**argv。argc 表示参数的个数,argv 表示命令行参数字符串指针数组指针。导出有参数命令示例如下: #include static void atcmd(int argc, char**argv) { if (argc RT-Thread shell commands: hello - say hello to RT-Thread atcmd - atcmd sample: atcmd version - show RT-Thread version information list_thread - list thread ……运行 atcmd 命令,运行结果如下所示: msh />atcmd Please input 'atcmd ' msh />atcmd server AT server! msh /> 1.3 FinSH 功能配置
FinSH 源码位于 components/finsh 目录下。FinSH组件不属于内核层。要想实现FinSH组件,如果使能了RT_USING_POSIX,最少需要利用内核中的线程和设备两个模块,如果没有使能RT_USING_POSIX,还需要内核的信号量模块。FinSH线程用于维护shell,设备用于rt_kprintf() 输出,信号量用于同步。 以使能RT_USING_POSIX为例,不使用信号量。 2.1 finsh shell的结构
FinSH线程的初始化使用的是RT-Thread 自动初始化机制,可以参考这篇文章了解https://blog.csdn.net/sinat_31039061/article/details/104127274 关于RT-Thread 的线程可以参考内核架构https://blog.csdn.net/sinat_31039061/article/details/104121771 创建FinSH线程: tid = rt_thread_create(FINSH_THREAD_NAME, finsh_thread_entry, RT_NULL, FINSH_THREAD_STACK_SIZE, FINSH_THREAD_PRIORITY, 10);FinSH线程的入口函数为: void finsh_thread_entry(void *parameter)进入finsh线程首先运行 rt_kprintf(FINSH_PROMPT);,输出msh />,然后进入while (1)死循环等待键盘的输入: rt_kprintf(FINSH_PROMPT); while (1) { ch = finsh_getchar(); if (ch 2.4.2 打开串口设备:控制台配置的是使用uart1,所以打开串口1设备: #define RT_CONSOLE_DEVICE_NAME "uart1" . . . /* Set the shell console output device */ #if defined(RT_USING_DEVICE) && defined(RT_USING_CONSOLE) rt_console_set_device(RT_CONSOLE_DEVICE_NAME); #endif rt_device_t rt_console_set_device(const char *name) { rt_device_t new_device, old_device; /* save old device */ old_device = _console_device; /* find new console device */ new_device = rt_device_find(name); if (new_device != RT_NULL) { if (_console_device != RT_NULL) { /* close old console device */ rt_device_close(_console_device); } /* set new console device */ rt_device_open(new_device, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_STREAM); _console_device = new_device; } return old_device; }把uart1这个串口设备句柄赋值给下边这个全局变量,以备rt_kprintf使用。 static rt_device_t _console_devicert_kprintf的实现: void rt_kprintf(const char *fmt, ...) { va_list args; rt_size_t length; static char rt_log_buf[RT_CONSOLEBUF_SIZE]; va_start(args, fmt); /* the return value of vsnprintf is the number of bytes that would be * written to buffer had if the size of the buffer been sufficiently * large excluding the terminating null byte. If the output string * would be larger than the rt_log_buf, we have to adjust the output * length. */ length = rt_vsnprintf(rt_log_buf, sizeof(rt_log_buf) - 1, fmt, args); if (length > RT_CONSOLEBUF_SIZE - 1) length = RT_CONSOLEBUF_SIZE - 1; #ifdef RT_USING_DEVICE if (_console_device == RT_NULL) { rt_hw_console_output(rt_log_buf); } else { rt_uint16_t old_flag = _console_device->open_flag; _console_device->open_flag |= RT_DEVICE_FLAG_STREAM; rt_device_write(_console_device, 0, rt_log_buf, length); _console_device->open_flag = old_flag; } #else rt_hw_console_output(rt_log_buf); #endif va_end(args); } |


【本文地址】