MATLAB |
您所在的位置:网站首页 › excel怎么选择标红的数据 › MATLAB |
MATLAB
|
前言:
本文旨在帮助大家上手excel管理simulink的数据字典,步骤和代码均是本人掌握之后总结的,代码亲手跑过没有问题,望各位看文章之前先一键三连,多谢。 目的:得到一个Model_Par_Sig.m的文件,当运行该文件的时候就会将对应的excel表格的signal和Parameter加载至matlab的工作区间,如图1所示:
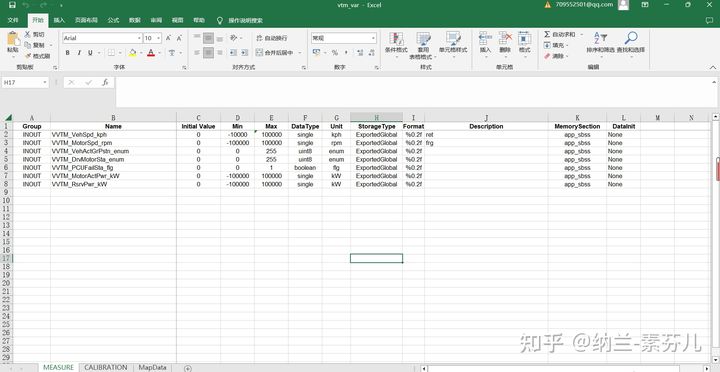
图1 实现方法: 步骤一:创建excel表格创建并命名为vtm_var的excel表并按照如下格式编辑表格内容:
图2
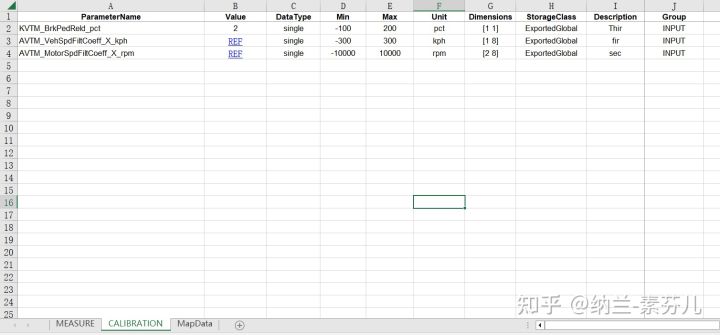
图3
图4 这里列举了7个观测量(MEASURE)和3个标定量(CALIBRATION),其中标定量分为数值,一维数组以及二维数组,‘REF’是标定量AVTM_VehSpdFiltCoeff_X_kph和AVTM_MotorSpdFiltCoeff_X_rpm的值的MapData链接,对应的数组值在图3的MapData中,下面讲解如何创建链接: 1)右键MapData中的标定量名,选择‘定义名称’,然后点击‘确定’; 2)切换到CALIBRATION,右键红色标注的地方,选择‘链接’,接着在已定义的名称中选中对应的标定量名称即可建立CALIBRATION和MapData的链接
图5
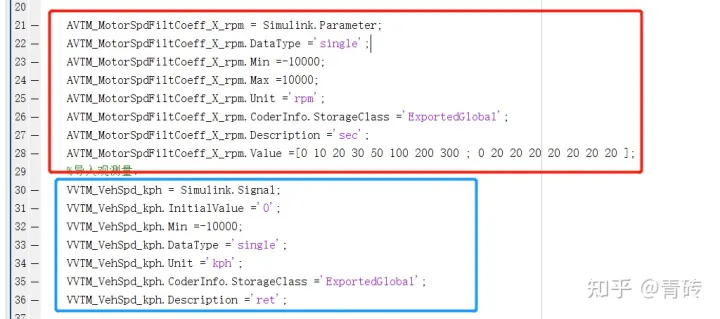
图6 步骤二:写一个Var.m的脚本Var.m脚本的主要目的是为了生成Model_Par_Sig.m的脚本文件,并且Model_Par_Sig.m脚本文件的格式如图7,包含Simulink.Signal和Simulink.Parameter的属性,后面的代码段详细备注了Var.m的编码细节。
图7 Var.m的代码如下所示,总共分为两部分,第一部分是导入标定量(CALIBRATION)的数据,第二部分是导入观测量(MEASURE)的数据: clear; %% %创建Model_Par_Sig.m文件并允许写入数据 output_m_file = 'Model_Par_Sig.m'; fid = fopen(output_m_file,'wt'); %在Model_Par_Sig.m的第一行写入clear命令,用于后面运行Model_Par_Sig.m之前首先清空工作区 fprintf(fid,'clear;\n'); %%%%%%%%%%%%%%%%%%% 导入标定量 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% fprintf(fid,'%%导入标定量:\n');%在Model_Par_Sig.m文件中打印‘%导入标定量:’ [~,~,CALIBRATION_Cell] = xlsread('vtm_var','CALIBRATION');%导入CALIBRATION工作表为单元数组 for row=2:size(CALIBRATION_Cell,1)%从CALIBRATION的第2行开始从上之下浏览内容 ParameterName = CALIBRATION_Cell{row,1};%获取标定量的名称 if ~ischar(ParameterName)%判断名称是不是字符串,是的话继续循环,否则结束 break; end %在Model_Par_Sig.m打印标定量的参数属性: outputParameter_str = strcat(ParameterName,' = ',' Simulink.Parameter',';\n'); fprintf(fid,outputParameter_str); %获取标定量的数据类型并在Model_Par_Sig.m文件中按照标准格式打印 DataType = CALIBRATION_Cell{row,3}; outputParameter_DataType = strcat(ParameterName,'.DataType ',' = ','''',DataType,'''',';\n'); fprintf(fid,outputParameter_DataType); %获取标定量Min和Max并在Model_Par_Sig.m文件中按照标准格式打印,注意打印之前首先需要先将数字类型转为字符串 if isnumeric(CALIBRATION_Cell{row,4}) Min = num2str(CALIBRATION_Cell{row,4});%将数字类型转为字符串 outputParameter_Min = strcat(ParameterName,'.Min ',' = ',Min,';\n'); fprintf(fid,outputParameter_Min); end if isnumeric(CALIBRATION_Cell{row,5}) Max = num2str(CALIBRATION_Cell{row,5});%将数字类型转为字符串 outputParameter_Max = strcat(ParameterName,'.Max ',' = ',Max,';\n'); fprintf(fid,outputParameter_Max); end %获取标定量的单位并在Model_Par_Sig.m文件中按照标准格式打印 Unit = CALIBRATION_Cell{row,6}; outputParameter_Unit = strcat(ParameterName,'.Unit ',' = ','''',Unit,'''',';\n'); fprintf(fid,outputParameter_Unit); %获取标定量的存储类型并在Model_Par_Sig.m文件中按照标准格式打印 StorageClass = CALIBRATION_Cell{row,8}; outputParameter_StorageClass = strcat(ParameterName,'.CoderInfo.StorageClass ',' = ','''',StorageClass,'''',';\n'); fprintf(fid,outputParameter_StorageClass); %获取标定量的备注并在Model_Par_Sig.m文件中按照标准格式打印 Description = CALIBRATION_Cell{row,9}; outputParameter_Description = strcat(ParameterName,'.Description ',' = ','''',Description,'''',';\n'); fprintf(fid,outputParameter_Description); %获取标定量的值 Val = CALIBRATION_Cell{row,2}; %标定量的数字是一个非数组的数据,则在Model_Par_Sig.m文件中按照标准格式打印 if isnumeric(Val) VALUE = num2str(Val); outputParameter_VALUE = strcat(ParameterName,'.Value ',' = ',VALUE,';\n'); fprintf(fid,outputParameter_VALUE); else %标定量的值是数组,则在MapData中搜寻与CALIBRATION相同的名字并获取数组的数据 if strcmp('REF',string(Val)) [~,~,Mapdata_Cell] = xlsread('vtm_var','MapData'); MapData_row = size(Mapdata_Cell,1);%获取MapData行数 %对表格的值进行循环赋值,分别对一维表格和二维表格进行处理 for row=1:MapData_row MapDataName = Mapdata_Cell{row,1}; if isnan(MapDataName) continue; else if ischar(MapDataName) && ~isnumeric(MapDataName) if strcmp(ParameterName, MapDataName) %numRow用来计算数组的行数,numRow==1表示一维数组,大于1则为多维数组 numRow = 0; for W_row=row+1:MapData_row if isnumeric(Mapdata_Cell{W_row,1}) && ~isnan(Mapdata_Cell{W_row,1}) numRow = numRow+1; continue; else break; end end %Model_Par_Sig.m文件中按照标准格式打印一维数组的值 if numRow == 1 outputParameter_VALUE = strcat(ParameterName,'.Value ',' = ','['); fprintf(fid,outputParameter_VALUE); for array_colume=1:size(Mapdata_Cell,2) if ~isnan(Mapdata_Cell{row+1,array_colume}) VALUE = num2str(Mapdata_Cell{row+1,array_colume}); outputParameter_VALUE = strcat(VALUE,'\40'); fprintf(fid,outputParameter_VALUE); else continue; end end fprintf(fid,'];\n'); %Model_Par_Sig.m文件中按照标准格式打印二维数组的值 else outputParameter_VALUE = strcat(ParameterName,'.Value ',' = ','['); fprintf(fid,outputParameter_VALUE); for array_row=1:numRow for array_colume=1:size(Mapdata_Cell,2) if ~isnan(Mapdata_Cell{row+array_row,array_colume}) VALUE = num2str(Mapdata_Cell{row+array_row,array_colume}); outputParameter_VALUE = strcat(VALUE,'\40'); fprintf(fid,outputParameter_VALUE); else break; end end if array_row ~= numRow fprintf(fid,'; '); else fprintf(fid,'];'); end end end end else end end end end end fprintf(fid,'\n'); end %% %%%%%%%%%%%%%%%%%%% 导入观测量 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% fprintf(fid,'%%导入观测量:\n'); [~,~,MEASURE_Cell] = xlsread('vtm_var','MEASURE'); %导入MEASURE工作表为单元数组 for row = 2:size(MEASURE_Cell,1) %从第2行开始循环处理每一行内容 MEASURE_Name = MEASURE_Cell{row,2}; % 提取信号名 %在Model_Par_Sig.m打印观测量的信号属性: if ischar(MEASURE_Name) outputParameter_str = strcat(MEASURE_Name,' = ',' Simulink.Signal',';\n'); fprintf(fid,outputParameter_str); %获取观测量的初始值并在Model_Par_Sig.m文件中按照标准格式打印 if isnumeric(MEASURE_Cell{row,3}) InitialValue = num2str(MEASURE_Cell{row,3}); outputParameter_InitialValue = strcat(MEASURE_Name,'.InitialValue ',' = ','''',InitialValue,'''',';\n'); fprintf(fid,outputParameter_InitialValue); end %获取观测量Min和Max并在Model_Par_Sig.m文件中按照标准格式打印,注意打印之前首先需要先将数字类型转为字符串 if isnumeric(MEASURE_Cell{row,4}) Min = num2str(MEASURE_Cell{row,4}); outputParameter_Min = strcat(MEASURE_Name,'.Min ',' = ',Min,';\n'); fprintf(fid,outputParameter_Min); end if isnumeric(MEASURE_Cell{row,5}) Max = num2str(MEASURE_Cell{row,5}); outputParameter_Max = strcat(MEASURE_Name,'.Max ',' = ',Max,';\n'); fprintf(fid,outputParameter_Max); end %获取观测量的数据类型并在Model_Par_Sig.m文件中按照标准格式打印 DataType = MEASURE_Cell{row,6}; outputParameter_DataType = strcat(MEASURE_Name,'.DataType ',' = ','''',DataType,'''',';\n'); fprintf(fid,outputParameter_DataType); %获取观测量的单位并在Model_Par_Sig.m文件中按照标准格式打印 Unit = MEASURE_Cell{row,7}; outputParameter_Unit = strcat(MEASURE_Name,'.Unit ',' = ','''',Unit,'''',';\n'); fprintf(fid,outputParameter_Unit); %获取观测量的存储类型并在Model_Par_Sig.m文件中按照标准格式打印 StorageClass = MEASURE_Cell{row,8}; outputParameter_StorageClass = strcat(MEASURE_Name,'.CoderInfo.StorageClass ',' = ','''',StorageClass,'''',';\n'); fprintf(fid,outputParameter_StorageClass); %获取观测量的备注并在Model_Par_Sig.m文件中按照标准格式打印 Description = MEASURE_Cell{row,10}; outputParameter_Description = strcat(MEASURE_Name,'.Description ',' = ','''',Description,'''',';\n'); fprintf(fid,outputParameter_Description); fprintf(fid,'\n'); end end run('Model_Par_Sig.m');%运行生成的Model_Par_Sig.m脚本文件 clc;%清除命令行窗口 步骤三:运行Var.m运行Var.m即可生成Model_Par_Sig.m,并成功在工作区创建excel对应的标定量和观测量的属性,其中生成的Model_Par_Sig.m文件代码如下: clear; %导入标定量: KVTM_BrkPedReld_pct = Simulink.Parameter; KVTM_BrkPedReld_pct.DataType ='single'; KVTM_BrkPedReld_pct.Min =-100; KVTM_BrkPedReld_pct.Max =200; KVTM_BrkPedReld_pct.Unit ='pct'; KVTM_BrkPedReld_pct.CoderInfo.StorageClass ='ExportedGlobal'; KVTM_BrkPedReld_pct.Description ='Thir'; KVTM_BrkPedReld_pct.Value =2; AVTM_VehSpdFiltCoeff_X_kph = Simulink.Parameter; AVTM_VehSpdFiltCoeff_X_kph.DataType ='single'; AVTM_VehSpdFiltCoeff_X_kph.Min =-300; AVTM_VehSpdFiltCoeff_X_kph.Max =300; AVTM_VehSpdFiltCoeff_X_kph.Unit ='kph'; AVTM_VehSpdFiltCoeff_X_kph.CoderInfo.StorageClass ='ExportedGlobal'; AVTM_VehSpdFiltCoeff_X_kph.Description ='fir'; AVTM_VehSpdFiltCoeff_X_kph.Value =[5 0.5 1 2 3 4 ]; AVTM_MotorSpdFiltCoeff_X_rpm = Simulink.Parameter; AVTM_MotorSpdFiltCoeff_X_rpm.DataType ='single'; AVTM_MotorSpdFiltCoeff_X_rpm.Min =-10000; AVTM_MotorSpdFiltCoeff_X_rpm.Max =10000; AVTM_MotorSpdFiltCoeff_X_rpm.Unit ='rpm'; AVTM_MotorSpdFiltCoeff_X_rpm.CoderInfo.StorageClass ='ExportedGlobal'; AVTM_MotorSpdFiltCoeff_X_rpm.Description ='sec'; AVTM_MotorSpdFiltCoeff_X_rpm.Value =[0 10 20 30 50 100 200 300 ; 0 20 20 20 20 20 20 20 ]; %导入观测量: VVTM_VehSpd_kph = Simulink.Signal; VVTM_VehSpd_kph.InitialValue ='0'; VVTM_VehSpd_kph.Min =-10000; VVTM_VehSpd_kph.DataType ='single'; VVTM_VehSpd_kph.Unit ='kph'; VVTM_VehSpd_kph.CoderInfo.StorageClass ='ExportedGlobal'; VVTM_VehSpd_kph.Description ='ret'; VVTM_MotorSpd_rpm = Simulink.Signal; VVTM_MotorSpd_rpm.InitialValue ='0'; VVTM_MotorSpd_rpm.Min =-100000; VVTM_MotorSpd_rpm.Max =100000; VVTM_MotorSpd_rpm.DataType ='single'; VVTM_MotorSpd_rpm.Unit ='rpm'; VVTM_MotorSpd_rpm.CoderInfo.StorageClass ='ExportedGlobal'; VVTM_MotorSpd_rpm.Description ='frg'; VVTM_VehActGrPstn_enum = Simulink.Signal; VVTM_VehActGrPstn_enum.InitialValue ='0'; VVTM_VehActGrPstn_enum.Min =0; VVTM_VehActGrPstn_enum.Max =255; VVTM_VehActGrPstn_enum.DataType ='uint8'; VVTM_VehActGrPstn_enum.Unit ='enum'; VVTM_VehActGrPstn_enum.CoderInfo.StorageClass ='ExportedGlobal'; VVTM_VehActGrPstn_enum.Description =''; |




【本文地址】
今日新闻 |
推荐新闻 |