基于ESP32的蓝牙小手柄 |
您所在的位置:网站首页 › esp32蓝牙键盘教程 › 基于ESP32的蓝牙小手柄 |
基于ESP32的蓝牙小手柄
|
基于ESP32的蓝牙小手柄 | 附Arduino源码
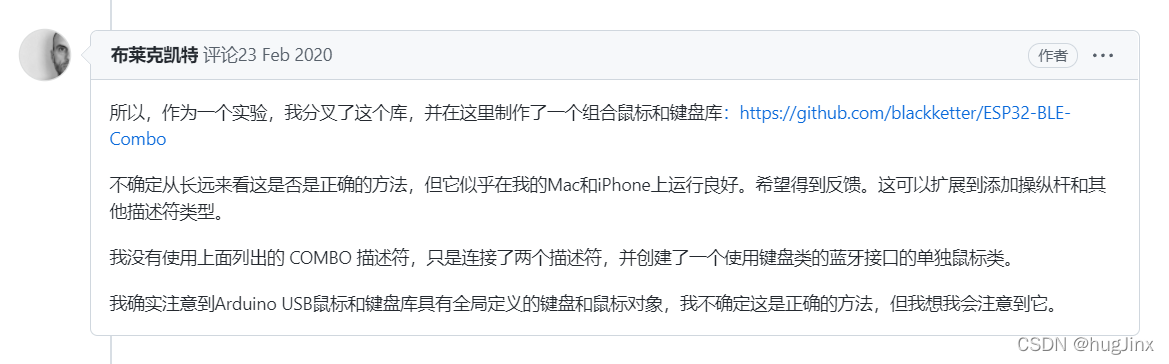
在B站看到了UP主皇工小毒仔的的视频感觉很有意思,可以拿来打原神,于是把他复现了出来由于UP主并没有开源代码,于是我把我的代码和UP主开源的网址一并发出供参考 皇工小毒仔的Gitee库 我的Gitee库 我的Github库 演示视频 我的代码是基于UP主的板子进行调试的,有很多资料在UP主的库里面都有提及 代码部分我把代码分为了两部分 一部分为连接电脑实现蓝牙手柄按键的功能 另一部分UP主使用摇杆控制小车移动的功能(UP主用的是MPU6050但我买回的来MPU6050有些问题我就放弃了你们也可以尝试一下) 你们也可以将两个代码合到一起通过按键切换 不过我没写 因为按键真的不够用啊= = 蓝牙键盘手柄我想试着用这个手柄来打原神,但这样就需要esp32同时模拟鼠标和键盘,当我尝试这样做的时候我发现这两个不能同时使用,所幸的是蓝牙键盘库和蓝牙鼠标库的作者Github库里的lssues区有个大佬将这两个库整合起来了,这个组合库和单独的库我都会放进我的Git库里面 下面我们来看代码,此处用到的简单定时器我也会放进我的Git库里面的 void setup() { // put your setup code here, to run once: Serial.begin(115200);//初始化波特率为115200 Keyboard.begin();// 蓝牙键盘初始化 Mouse.begin();//蓝牙鼠标初始化 Serial.println("Starting BLE Keyboard&Mouse!");//串口打印信息 pinMode(33, INPUT_PULLUP); //设置摇杆SW为上拉输入模式 pinMode(34, INPUT);//摇杆34,35脚设置为输入模式 pinMode(35, INPUT); //此处配置按键为输出模式并设为高电平 pinMode(14, OUTPUT); digitalWrite(14, HIGH); pinMode(25, OUTPUT); digitalWrite(25, HIGH); pinMode(26, OUTPUT); digitalWrite(26, HIGH); pinMode(27, OUTPUT); digitalWrite(27, HIGH); pinMode(4, OUTPUT); digitalWrite(4, HIGH); pinMode(19, OUTPUT); digitalWrite(19, HIGH); timer.setInterval(0.001L, Simple_timer_1);//设置一个简单定时器1 1L=一毫秒 Serial.println("Init OK!"); }setup里面打开蓝牙键盘和鼠标,初始化简单定时器并打开它,因为我用的是整合库,所以我并没有像单独使用键盘和鼠标一样去初始化名字电量这些,如果你想改请使用BleComboKeyboard函数,因为他的组合库是以键盘形式来链接蓝牙的,但也可以操作鼠标,因为我修改的是.h文件里的默认值,所以我就没有添加这个函数 void Simple_timer_1() { //简单定时器1 //读取按键和摇杆IO口的电平 KeyUp = digitalRead(25); KeyDown = digitalRead(27); KeyLeft = digitalRead(14); KeyRight = digitalRead(26); Key_Front_Left = digitalRead(4); Key_Front_Right = digitalRead(19); JoyX = analogRead(35); JoyY = analogRead(34); JoySW = digitalRead(33); }简单定时器里面就一直读取引脚电平,直接放到loop里面从而不使用定时器也行,但我更喜欢loop里面更少的代码 void joy() { //摇杆函数 进入函数执行摇杆的一系列操作 此处可以自由发挥 //判断摇杆y轴状态 JoyY这里定义>3500表示正推 3500) { Mouse.move(0, -1);//Mouse.move函数控制鼠标移动 Serial.println("joyUp"); } else if (JoyY < 350) { Mouse.move(0, 1); Serial.println("joyDown"); } //判断摇杆x轴状态 JoyX这里定义>3500表示正推 3500) { Mouse.move(-1, 0); Serial.println("joyLeft"); } else if (JoyX < 350) { Mouse.move(1, 0); Serial.println("joyRight"); } //判断摇杆按钮状态 当按钮被按下,读取值为0 if (JoySW == 0) { Genshin = 1;//切换为原神模式0w0 while (JoySW == 0) { JoySW = digitalRead(33); } Serial.println("joyPress"); } }joy是摇杆函数此处的3500和350是通过读取引脚的AD值得到的,每种型号的开发板读取到的值貌似不一样,我只试了UNO和ESP32,UNO就一直稳定在400多,当正推时会达到600多,所以就可以设置大于600时为正推,发推都为0,但esp32并不一样,当你没任何操作时它会稳定在2000左右,正推时可以达到4000多,于是我设置为大于3500为正推,小于350为反推 按键函数就不放了,大家伙都会 void loop() { // put your main code here, to run repeatedly: timer.run();//运行简单定时器 if (Keyboard.isConnected()) { //通过 Keyboard.isConnected() 来判断ESP32是否与电脑连接成功,如果没有连接,写在这里面的程序是不会执行的,只有在电脑与ESP32配对连接之后,里面的程序才会执行。 // codes here... if (Genshin == 0) { joy(); key(); } else if (Genshin == 1) { joy_Genshin(); key_Genshin(); } } }我就喜欢这样的loop函数,很简洁,Genshin是我写的原神模式 摇杆遥控小车部分这里我又准备了一块esp32开发板,和小车进行连接,这两块esp32通过wifi模块和ESP-NOW协议进行数据通信 这里放一下ESP-NOW协议的官网 可以去看一下 ESP-NOW #include "WiFi.h" void setup(){ Serial.begin(115200); WiFi.mode(WIFI_MODE_STA); Serial.print("MAC地址为:"); Serial.println(WiFi.macAddress()); } void loop(){ }通过这串代码获取接收板的MAC地址 使发送板能与之通信
以下代码是发送板代码 记录下你的MAC地址将其填到uint8_t broadcastAddress[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};里面 // 此处为接收的ESP32的MAC地址 uint8_t broadcastAddress[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; // 发送数据的结构示例 // 必须匹配接收器结构 typedef struct struct_message { int control; int pwm; } struct_message; // 创建一个名为myData的struct_message的数据结构 struct_message myData; // 当数据发送时回调 void OnDataSent(const uint8_t *mac_addr, esp_now_send_status_t status) { Serial.print("\r\nLast Packet Send Status:\t"); Serial.println(status == ESP_NOW_SEND_SUCCESS ? "Delivery Success" : "Delivery Fail"); } void setup() { Serial.begin(115200); // 将设备设置为Wi-Fi站 WiFi.mode(WIFI_STA); // 初始化 ESP-NOW if (esp_now_init() != ESP_OK) { Serial.println("Error initializing ESP-NOW"); return; } // 一旦ESPNow成功初始化,我们将注册Send CB来获取发送报文的状态 esp_now_register_send_cb(OnDataSent); // Register peer esp_now_peer_info_t peerInfo; memcpy(peerInfo.peer_addr, broadcastAddress, 6); peerInfo.channel = 0; peerInfo.encrypt = false; // Add peer if (esp_now_add_peer(&peerInfo) != ESP_OK) { Serial.println("Failed to add peer"); return; } myData.control = 0;//0:stop 1:run 2:back 3:left 4:right myData.pwm = 75; pinMode(33, INPUT_PULLUP); //设置摇杆SW为上拉输入模式 pinMode(34, INPUT);//摇杆34,35脚设置为输入模式 pinMode(35, INPUT); pinMode(25, OUTPUT); digitalWrite(25, HIGH); pinMode(27, OUTPUT); digitalWrite(27, HIGH); }初始化里面很多设置函数 在官方网站里面都有讲 我们会用就行 以下代码是接受板代码 //此处简单定时器的作用为PWM控制小车移速 void Simple_timer_1() { pwm = pwm + 1; if (pwm == 255) { digitalWrite(ENA1, HIGH); digitalWrite(ENA2, HIGH); pwm = 0; } if (pwm == myData.pwm) { digitalWrite(ENA1, LOW); digitalWrite(ENA2, LOW); } }这里的myData.pwm是发送板发送来的数据 来进行控速 // 当接收到数据时执行的回调函数 当接受到数据时才会运行以下函数 void OnDataRecv(const uint8_t * mac, const uint8_t *incomingData, int len) { memcpy(&myData, incomingData, sizeof(myData)); if (myData.control == 0) { car_stop(); Serial.println("stop"); } else if (myData.control == 1) { car_run(); Serial.println("run"); } else if (myData.control == 2) { car_back(); Serial.println("back"); } else if (myData.control == 3) { car_left(); Serial.println("left"); } else if (myData.control == 4) { car_right(); Serial.println("right"); } }这里就是通过发送板发送来的myData.control的值来判断小车的运动 到此为止你就拥有了一个基本智能的手柄 自己拿来娱乐还是很不错的 我再夸一句皇工小毒仔的PCB画的真的很好 很细 我感觉很不错很Nice 开出来是这个样子的 不是很大 大约巴掌大小 |

【本文地址】
今日新闻 |
推荐新闻 |