ROS tf使用报错:ImportError: dynamic module does not define module export function (PyInit |
您所在的位置:网站首页 › dynamic的意思 › ROS tf使用报错:ImportError: dynamic module does not define module export function (PyInit |
ROS tf使用报错:ImportError: dynamic module does not define module export function (PyInit
|
ROS tf使用报错:ImportError: dynamic module does not define module export function (PyInit_tf使用报错:ImportError: dynamic module does not define module export function (PyInit__tf2)
问题描述问题原因解决方法
问题描述
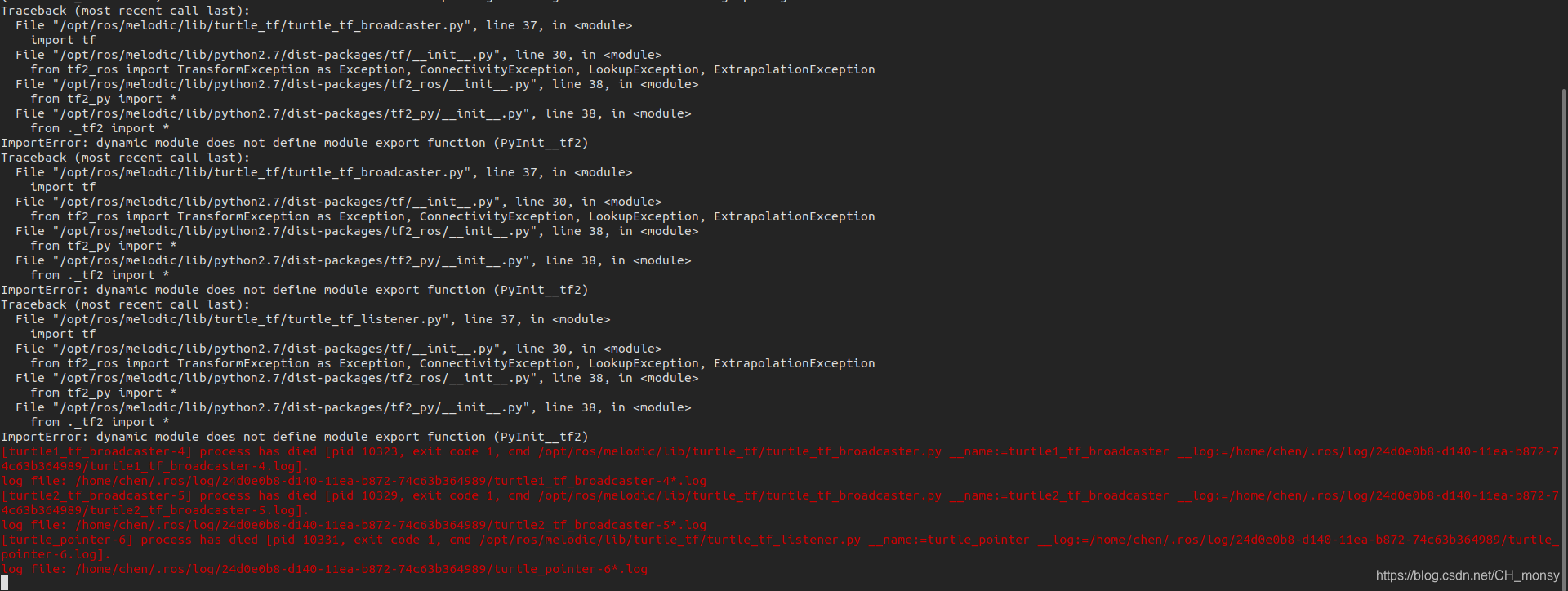
在ROS melodic版本下运行gazebo或者roslaunch时会报错: ImportError: dynamic module does not define module export function (PyInit__tf2) 导致命令无法执行。 如运行古月ROS入门21讲P17ROS中的坐标管理系统 roslaunch turtle_tf turtle_tf_demo.launch
Traceback (most recent call last): File “/opt/ros/melodic/lib/turtle_tf/turtle_tf_broadcaster.py”, line 37, in import tf File “/opt/ros/melodic/lib/python2.7/dist-packages/tf/init.py”, line 30, in from tf2_ros import TransformException as Exception, ConnectivityException, LookupException, ExtrapolationException File “/opt/ros/melodic/lib/python2.7/dist-packages/tf2_ros/init.py”, line 38, in from tf2_py import * File “/opt/ros/melodic/lib/python2.7/dist-packages/tf2_py/init.py”, line 38, in from ._tf2 import * ImportError: dynamic module does not define module export function (PyInit__tf2) Traceback (most recent call last): File “/opt/ros/melodic/lib/turtle_tf/turtle_tf_broadcaster.py”, line 37, in import tf File “/opt/ros/melodic/lib/python2.7/dist-packages/tf/init.py”, line 30, in from tf2_ros import TransformException as Exception, ConnectivityException, LookupException, ExtrapolationException File “/opt/ros/melodic/lib/python2.7/dist-packages/tf2_ros/init.py”, line 38, in from tf2_py import * File “/opt/ros/melodic/lib/python2.7/dist-packages/tf2_py/init.py”, line 38, in from ._tf2 import * ImportError: dynamic module does not define module export function (PyInit__tf2) Traceback (most recent call last): File “/opt/ros/melodic/lib/turtle_tf/turtle_tf_listener.py”, line 37, in import tf File “/opt/ros/melodic/lib/python2.7/dist-packages/tf/init.py”, line 30, in from tf2_ros import TransformException as Exception, ConnectivityException, LookupException, ExtrapolationException File “/opt/ros/melodic/lib/python2.7/dist-packages/tf2_ros/init.py”, line 38, in from tf2_py import * File “/opt/ros/melodic/lib/python2.7/dist-packages/tf2_py/init.py”, line 38, in from ._tf2 import * ImportError: dynamic module does not define module export function (PyInit__tf2) [turtle1_tf_broadcaster-4] process has died [pid 10323, exit code 1, cmd /opt/ros/melodic/lib/turtle_tf/turtle_tf_broadcaster.py __name:=turtle1_tf_broadcaster __log:=/home/chen/.ros/log/24d0e0b8-d140-11ea-b872-74c63b364989/turtle1_tf_broadcaster-4.log]. log file: /home/chen/.ros/log/24d0e0b8-d140-11ea-b872-74c63b364989/turtle1_tf_broadcaster-4*.log [turtle2_tf_broadcaster-5] process has died [pid 10329, exit code 1, cmd /opt/ros/melodic/lib/turtle_tf/turtle_tf_broadcaster.py __name:=turtle2_tf_broadcaster __log:=/home/chen/.ros/log/24d0e0b8-d140-11ea-b872-74c63b364989/turtle2_tf_broadcaster-5.log]. log file: /home/chen/.ros/log/24d0e0b8-d140-11ea-b872-74c63b364989/turtle2_tf_broadcaster-5*.log [turtle_pointer-6] process has died [pid 10331, exit code 1, cmd /opt/ros/melodic/lib/turtle_tf/turtle_tf_listener.py __name:=turtle_pointer __log:=/home/chen/.ros/log/24d0e0b8-d140-11ea-b872-74c63b364989/turtle_pointer-6.log]. log file: /home/chen/.ros/log/24d0e0b8-d140-11ea-b872-74c63b364989/turtle_pointer-6*.log 问题原因出现这种问题一般是由于Ros目前只支持Python2,一些主要的功能包如tf2等都是在Python2的环境下运行的,在Python2中导入相关包不会出现问题,但在Python3中会出错。而目前大部分用户Ubuntu习惯配置和优先使用Python3,所以会导致这类问题出现。 解决方法ROS melodic 配置 python3: 安装 ROS python3 依赖 sudo apt update sudo apt install python3-catkin-pkg-modules python3-rospkg-modules python3-empy 编译工作空间 mkdir -p ~/catkin_ws/src; cd ~/catkin_ws catkin_make source devel/setup.bash wstool init wstool set -y src/geometry2 --git https://github.com/ros/geometry2 -v 0.6.5 wstool up rosdep install --from-paths src --ignore-src -y -r 完成python3配置 catkin_make --cmake-args -DCMAKE_BUILD_TYPE=Release -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython3.6m.s source 工作空间 ROS 就可以在python3下运行了。 |
 报错日志
报错日志 oh,这糟糕的体位。
oh,这糟糕的体位。【本文地址】
今日新闻 |
推荐新闻 |