虚拟调试(Virtual Commissioning)之传感器 |
您所在的位置:网站首页 › commission调试 › 虚拟调试(Virtual Commissioning)之传感器 |
虚拟调试(Virtual Commissioning)之传感器
|
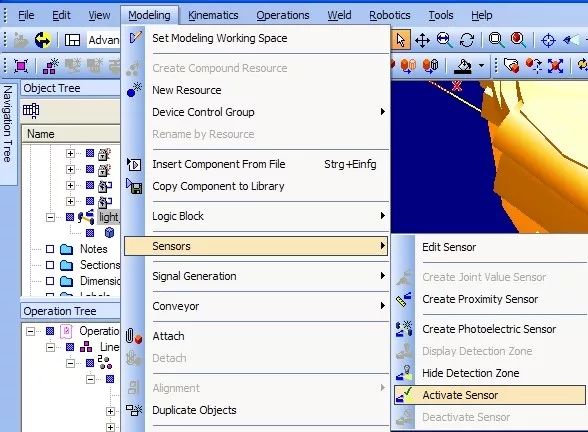
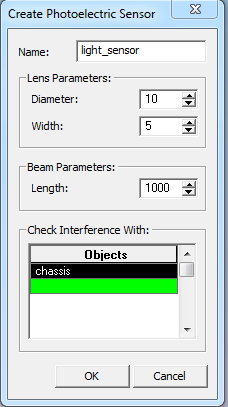
3、通过在Diameter和Width栏中选择值,给光电传感器设置透镜参数。 提示: ·镜头在Graphic Viewer中显示成红色。 ·Length是光电传感器发射的光束长度最大值。这个值在Graphic Viewer中显示成黄色。 4、在Length栏中选择值,给光电传感器设置光束参数。 5、在CheckInterference 区内定义当黄色光束发生干涉碰撞时会被光电传感器检测到的对象。 6、点击OK,创建传感器资源,input signal的名字与传感器相同。 提示: 当干扰穿过传感器光束的时候传感器信号由1触发。 创建光电传感器后,默认被设置在原始单元中。要想重新放置传感器,选择Tools ->Placement指令。 为激活传感器,选择传感器,点击Modeling ->Sensors ->Activate Sensor键。传感器可以通过点击Modeling ->Sensors ->Deactivate Sensor关闭。 如果需要,在指令Modeling-> Sensors ->Display Detection Zone或Modeling -> Sensors ->Hide Detection Zone下,光束会被显现或隐藏。
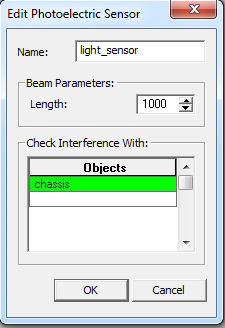
警告: 默认状态下,光电传感器是未激活的。可以激活,但是通常会被忽略。他们需要真正意义上的被激活。 编辑光电传感器 选择传感器资源,在菜单中选择Modeling-> Sensors -> Edit Sensor。Edit Photoelectric Sensor对话框显示如下:
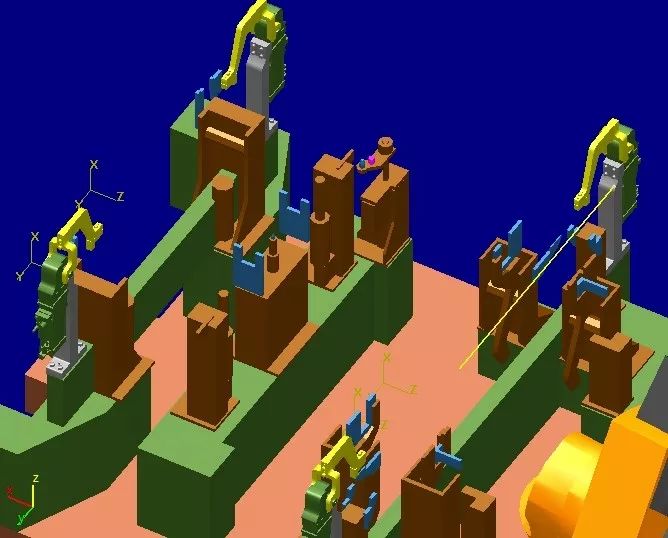
可以改变以下设置: ·给传感器键入新名称。 ·改变光束长度值。 ·移动或添加可被传感器检测到的部分。 警告:传感器信号名称不会根据新的传感器名称而改变。 下面进入实战: Ø 创建一个光电传感器。 Ø 使用这个传感器来确认夹具中零件的存在。 Ø 如果零件没有出现,需阻止机器继续工作。 1、线性模拟模式下加载仿真,如下所示(可自行创建空项目)。
2、将LineOperation设置为currentoperation(当前操作)。 3、运行模拟观察操作、传递条件和逻辑现象。 4、停止、重置模拟。 5、创建传感器: ·右击Robi 125_prep操作,选择Generate Appearances。 ·选择Modeling à Sensors à CreatePhotoelectric Sensor。 ·选择Check InterferenceWith。 ·选择chassis,点击ok。
6、打开Signal Viewer并观察光电传感器资源输入信号是否被成功创建。 7、将传感器放入Graphic Viewer: ·在Objects Tree中,选择传感器; ·选择View -> Zoom to Selection。 提示:在Working Frame中被创建。 ·选择Tools -> Placement -> Relocate来放置传感器。 ·如图,将传感器从Self-Origin放入到sensor frame中。
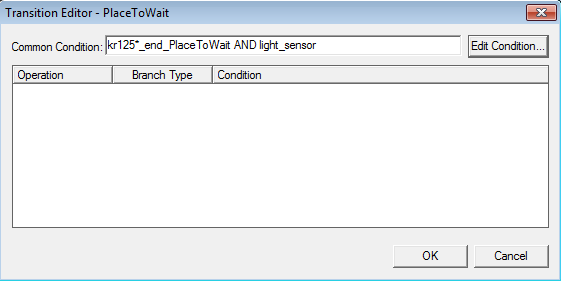
提示:光电传感器必须放置在夹具中的某个地方,以使其光束方向能够穿透夹具中的零件。 ·点击Close。 8、如果夹具中没有出现零件时,为停止350机器焊接,我们必须在350机器人焊接之前参考光传感器信号改变传递条件。 ·双击PlaceToWait传递条件。 ·点击Edit Condition。 ·将光敏感器信号与现有的PlaceToWait_end条件结合。 ·点击OK。
9、激活光电传感器: ·在Object Tree选择light_sensor; ·选择Modeling-> Sensors ->Activate sensor。 10、设置Simulation Panel以显示light_sensor信号。
11、将LineOperation设置为当前操作,运行模拟。 提示:在模拟过程中,观察simulation panel中光电传感器的状 态。每当零件穿过夹具被传感器监测到,就从FALSE(红色的)变成TRUE(绿色的)。 12、停止、重置模拟。 13、停止传感器: ·在Object Tree选择light_sensor。 ·选择Modeling-> Sensors ->Deactivate sensor。 14、再次运行模拟。 15、机器没有开始焊接,因为未激活的光电传感器没有触发TRUE信号。 16、停止、重置模拟。返回搜狐,查看更多 |

【本文地址】
今日新闻 |
推荐新闻 |