|
一、前言
写此篇博客为了记录看过3Blue1Brown之线性代数的本质后带来无比巨大的收获。本文大部分图摘自3blue1brown,强烈推荐有兴趣的进行相关阅读。
二、正文
01-向量是什么

对于向量是什么
一般有三种理解: 第一种是物理上的向量,我们认为是一个有方向的箭头,它有两个参数一个是长度,一个是方向。当这两个参数确定后,这个箭头可以在空间中任意移动。 第二种是在计算机学生眼里,向量只不过是“列表”的高级词汇,比如我们在谈论房价时候,我们只在乎房子的大小和价格,这时候我们就会将这两个参数组成一个有序的列表  第三种是在数学上,数学家想要统一这两种观点,他们认为:“向量可以是任何东西,但他们能够进行:向量与向量相加、向量与数相乘,这两个运算。” 第三种是在数学上,数学家想要统一这两种观点,他们认为:“向量可以是任何东西,但他们能够进行:向量与向量相加、向量与数相乘,这两个运算。”  在我们讨论这两个运算之前,我们先用几何直观感受一下向量的存在。 在我们讨论这两个运算之前,我们先用几何直观感受一下向量的存在。
 从几何直观上讨论一个向量时候,我们将向量画成一个尾部在原点的箭头,这可能与物理中“可以任意移动的向量”有些违背。但带来的好处也是显而易见的,这个向量的值也就等于这个箭头头部坐标组成的序列:
[
−
2
3
]
\begin{bmatrix} -2 \\ 3 \end{bmatrix} \quad
[−23] 这符合上述提到的“计算机专业学生”对于向量的看法。 从几何直观上讨论一个向量时候,我们将向量画成一个尾部在原点的箭头,这可能与物理中“可以任意移动的向量”有些违背。但带来的好处也是显而易见的,这个向量的值也就等于这个箭头头部坐标组成的序列:
[
−
2
3
]
\begin{bmatrix} -2 \\ 3 \end{bmatrix} \quad
[−23] 这符合上述提到的“计算机专业学生”对于向量的看法。 
此时,对于二维向量来说,序列中的两个数和几何中的箭头是一一对应的。每一个向量恰好对应唯一的一对数。而一对数恰好又对应唯一的一个向量。此时我们把向量拓展到三维  序列中的三个数字分别代表了这个向量在x,y,z三个轴的坐标。对于多维向量,以此类推。 序列中的三个数字分别代表了这个向量在x,y,z三个轴的坐标。对于多维向量,以此类推。
向量加法
现在我们回到刚才说到的向量的加法运算,对于如下的向量v和w  v+w在几何上表示为:将w向量平移,使得w的起点和v的重点重合,此时,连接v的起点于w的终点,得到向量v+w: v+w在几何上表示为:将w向量平移,使得w的起点和v的重点重合,此时,连接v的起点于w的终点,得到向量v+w:  这个向量加法的定义差不多是线性代数中唯一允许向量离开原点的情形。现在我们讨论一下这样做的合理性。向量更像是一种从起点到终点的运动,先朝v方向移动固定距离,再向w方向移动固定距离,等价于向v+w的方向移动一个固定的距离。我们可以把它想成是数轴上加法的拓展。 这个向量加法的定义差不多是线性代数中唯一允许向量离开原点的情形。现在我们讨论一下这样做的合理性。向量更像是一种从起点到终点的运动,先朝v方向移动固定距离,再向w方向移动固定距离,等价于向v+w的方向移动一个固定的距离。我们可以把它想成是数轴上加法的拓展。  我们向右移动2步再加上向右移动五步,等价于我们向右移动7步。 拓展到二维,合向量也就表现为两个原向量横坐标、纵坐标分别相加 我们向右移动2步再加上向右移动五步,等价于我们向右移动7步。 拓展到二维,合向量也就表现为两个原向量横坐标、纵坐标分别相加  另一个重要的运算是竖乘,这个理解起来就更容易了。在几何上表现为“拉伸、放缩” 如下图所示2v代表将v方向不变,大小延长2倍,显然0.5v代表缩小为原来的二分之一。 另一个重要的运算是竖乘,这个理解起来就更容易了。在几何上表现为“拉伸、放缩” 如下图所示2v代表将v方向不变,大小延长2倍,显然0.5v代表缩小为原来的二分之一。
 当竖乘的值为负数代表向反方向延长1.8倍 当竖乘的值为负数代表向反方向延长1.8倍  当然,我们结合代数,这样的竖乘也就表现为各个坐标的值乘相应的竖乘倍数,如下图所示,新的向量的两个值分别为原有向量的值的二倍 当然,我们结合代数,这样的竖乘也就表现为各个坐标的值乘相应的竖乘倍数,如下图所示,新的向量的两个值分别为原有向量的值的二倍 
02-线性组合、张成的空间与基
我们在上一节提到,一个向量是“横坐标”的竖乘加上“竖坐标”的竖乘,一般的我们把“横坐标的基向量”称为i,“纵坐标的基向量”称为j,i、j称为该向量的一组基。也就是说,平面上的任意向量都是i,j两个向量的竖乘之和。  显然,对于 如果我们选择不同的基向量,我们就会得到一个新的坐标系,如下图的v与w作为基向量,就会得到一个全新的坐标系。 显然,对于 如果我们选择不同的基向量,我们就会得到一个新的坐标系,如下图的v与w作为基向量,就会得到一个全新的坐标系。  以二维向量为例,对于基向量x,y,有任意常数a,b,通过线性组合能够得到一个新的向量ax+by。由于a,b具有任意性,可以得到无数的向量,我们把这些向量的集合称为张成的空间。 显然,张成的空间有以下三种情况: 当a和b都是0向量时,张成的空间也是0向量。 当a和b共线时,张成的空间是一条直线。 当a和b不共线时,张成的空间是整个二维平面。 【三维空间同理,不再赘述】 当有一组向量是“多余的”,也就是说它对张成空间没有做出任何贡献;或者说,如果我们移除了某个向量但没有减小张成的空间,我们则称这些向量是线性相关的。或者说这个“多余向量”可以由其他向量线性表示。 另一方面,如果所有的向量都给张成的空间增添了新的维度,他们就被称为是“线性无关”的 以二维向量为例,对于基向量x,y,有任意常数a,b,通过线性组合能够得到一个新的向量ax+by。由于a,b具有任意性,可以得到无数的向量,我们把这些向量的集合称为张成的空间。 显然,张成的空间有以下三种情况: 当a和b都是0向量时,张成的空间也是0向量。 当a和b共线时,张成的空间是一条直线。 当a和b不共线时,张成的空间是整个二维平面。 【三维空间同理,不再赘述】 当有一组向量是“多余的”,也就是说它对张成空间没有做出任何贡献;或者说,如果我们移除了某个向量但没有减小张成的空间,我们则称这些向量是线性相关的。或者说这个“多余向量”可以由其他向量线性表示。 另一方面,如果所有的向量都给张成的空间增添了新的维度,他们就被称为是“线性无关”的
03-矩阵与线性变换
“变换”是“函数”这个词更为花哨的说法。我们输入一个向量通过某个函数得到另一个向量。变换更像是一种“运动的过程”——将一种坐标系转换成另一种坐标系。如下图1到图2的变化: 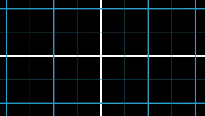 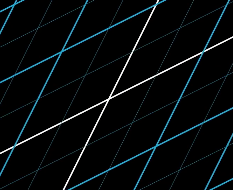 这种变化是多种多样的,如下面的变化: 这种变化是多种多样的,如下面的变化:  所以我们对变化加一个限定:“线性变换”,当满足以下两个条件,这个变化就是线性变化: 1.Lines remain lines:即直线在变换后仍保持为直线,不能有所弯曲 2.Origin remains fixed:即原点必须保持固定 看一个比较容易混淆的例子: 所以我们对变化加一个限定:“线性变换”,当满足以下两个条件,这个变化就是线性变化: 1.Lines remain lines:即直线在变换后仍保持为直线,不能有所弯曲 2.Origin remains fixed:即原点必须保持固定 看一个比较容易混淆的例子: 这样的变换是“线性”的吗?(坐标轴间距不等) 显然不是的,我们的原则1直线变换后仍是直线,不只是在说坐标轴,比如下面的这条对角线。 这样的变换是“线性”的吗?(坐标轴间距不等) 显然不是的,我们的原则1直线变换后仍是直线,不只是在说坐标轴,比如下面的这条对角线。  总的来说,线性变换要保障坐标系的网格线保持平行并等距分布 下面我们更加量化的看这个问题,其实只需要观察两个基坐标的变化,就能顺利观察到线性变化的关键 总的来说,线性变换要保障坐标系的网格线保持平行并等距分布 下面我们更加量化的看这个问题,其实只需要观察两个基坐标的变化,就能顺利观察到线性变化的关键 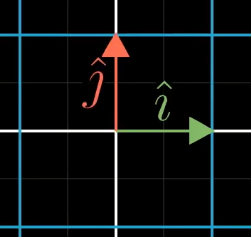  当经过线性变换后,i和j都会相应的改变,例如: 当经过线性变换后,i和j都会相应的改变,例如:  对于向量v在我们熟知的这个直角坐标系中的向量为[-1,2]^T代表着v=-1i+2j。 对于向量v在我们熟知的这个直角坐标系中的向量为[-1,2]^T代表着v=-1i+2j。  当经过线性变换后,v仍然为-1i+2j只不过这时候i和j相较于之前的支教坐标系,发生了改变。 当经过线性变换后,v仍然为-1i+2j只不过这时候i和j相较于之前的支教坐标系,发生了改变。  换句话说,只要我们知道变换后的i和j的直角坐标,我们就可以知道变换后的v向量[5,2]^T。也就是说我们只需要记录i和j就足以得到线性变换后的坐标系中的任何向量。 我们抽象为代数 换句话说,只要我们知道变换后的i和j的直角坐标,我们就可以知道变换后的v向量[5,2]^T。也就是说我们只需要记录i和j就足以得到线性变换后的坐标系中的任何向量。 我们抽象为代数  一个22的矩阵代表着基向量通过这个矩阵可以将[5,7]^T这个向量线性变换。 再次抽象为表达式,就得到了矩阵的乘法公式!! 一个22的矩阵代表着基向量通过这个矩阵可以将[5,7]^T这个向量线性变换。 再次抽象为表达式,就得到了矩阵的乘法公式!!  再次回顾一下: 再次回顾一下:  如上图一样,我们把22矩阵看作是线性变换后的基向量,把列向量的乘法看作是基向量的线性组合。 下面举一些有趣的例子: 1.逆时针旋转90度 如上图一样,我们把22矩阵看作是线性变换后的基向量,把列向量的乘法看作是基向量的线性组合。 下面举一些有趣的例子: 1.逆时针旋转90度  当我们想计算任意向量逆时针旋转90度,我们仅仅需要和这个矩阵相乘即可 当我们想计算任意向量逆时针旋转90度,我们仅仅需要和这个矩阵相乘即可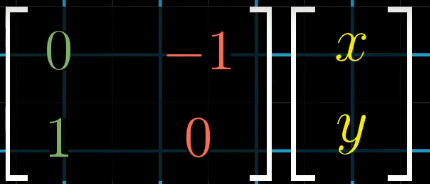
2.剪切    注意,还有一些特殊情况,如:当i与j是线性相关的,得到的张成空间是一条直线 注意,还有一些特殊情况,如:当i与j是线性相关的,得到的张成空间是一条直线 
04-矩阵乘法与线性变换复合
 将上一节我们的思路进一步拓展,我们将一个向量先左乘一个旋转矩阵再左乘一个剪切矩阵得到的新的向量。它等价于直接左乘某一个复合矩阵。从代数的角度来看一遍: 将上一节我们的思路进一步拓展,我们将一个向量先左乘一个旋转矩阵再左乘一个剪切矩阵得到的新的向量。它等价于直接左乘某一个复合矩阵。从代数的角度来看一遍:  先将[1,1]^T这个向量经过一次M2的变换(我们上节说到过,本质是以M2的列向量为基做线性变换,所以计算方法如上图)同理的,我们对M1的第二列向量做同样的操作,这就得到了矩阵乘法的运算公式: 先将[1,1]^T这个向量经过一次M2的变换(我们上节说到过,本质是以M2的列向量为基做线性变换,所以计算方法如上图)同理的,我们对M1的第二列向量做同样的操作,这就得到了矩阵乘法的运算公式:  下面我们看两个例子来强化理解: ①M1M2==M2M1(矩阵乘法遵循交换律吗?) 下面我们看两个例子来强化理解: ①M1M2==M2M1(矩阵乘法遵循交换律吗?)   几何直观的考虑,先剪切再旋转得到的两个基夹角为锐角,先旋转再剪切无疑放大了夹角,他们变成了钝角 。所以显然矩阵不满足交换律 ②矩阵乘法是否满足结合律呢 几何直观的考虑,先剪切再旋转得到的两个基夹角为锐角,先旋转再剪切无疑放大了夹角,他们变成了钝角 。所以显然矩阵不满足交换律 ②矩阵乘法是否满足结合律呢  由于我们上文提到过,矩阵乘法应当从右向左去看,某个向量先经过了C的变换后,再经过一个AB变换(先经过B再经过A)和某个向量先经过BC的变换(先经过C再经过B)然后再经过A的变换。这两个操作无疑是完全相同的。所以一定是满足结合律的。 ps:这里真的很佩服,选一个视频里的话来支持作者的观点: 由于我们上文提到过,矩阵乘法应当从右向左去看,某个向量先经过了C的变换后,再经过一个AB变换(先经过B再经过A)和某个向量先经过BC的变换(先经过C再经过B)然后再经过A的变换。这两个操作无疑是完全相同的。所以一定是满足结合律的。 ps:这里真的很佩服,选一个视频里的话来支持作者的观点: 
05-行列式
继续思考上一节所讲的线性变换,我们可以注意到有些线性变换将空间向外拉伸,有的则向内挤压。   现在我们定量的对这件事情进行考量,一个很好的方法是衡量i,j所张成的平行四边形面积: 现在我们定量的对这件事情进行考量,一个很好的方法是衡量i,j所张成的平行四边形面积:   可以看到这个线性变换i延长了3倍,j延长了2倍,新的面积是6,原来的面积是1.放大了6倍。 可以看到这个线性变换i延长了3倍,j延长了2倍,新的面积是6,原来的面积是1.放大了6倍。  同样的,对于这个剪切变换,并没有改变平行四边形的面积,所以放缩比例是1。 我们把这个放缩的比例称为——行列式 同样的,对于这个剪切变换,并没有改变平行四边形的面积,所以放缩比例是1。 我们把这个放缩的比例称为——行列式  需要注意两个点: 1.当线性变换的两个向量线性相关,则围成的面积为0。 需要注意两个点: 1.当线性变换的两个向量线性相关,则围成的面积为0。 
2.行列式可能有正负,这是由于i与j的相对方位不同导致的,这也是和我们初中高中学过的右手定则一个原理。   3.拓展到三维,行列式的意义为三个向量所围成的平行六面体的体积。 3.拓展到三维,行列式的意义为三个向量所围成的平行六面体的体积。
4.行列式如何计算? 以2维为例,见下图: 
06-逆矩阵、列空间、零空间
 现在讨论线性方程组,根据前面学到的,对x向量左乘A相当于对x进行一次线性变换。 所以我们要求的是一个向量(x,y,z)^T经过A这个矩阵变换后,变成了向量v(-3,0,2)。 现在讨论线性方程组,根据前面学到的,对x向量左乘A相当于对x进行一次线性变换。 所以我们要求的是一个向量(x,y,z)^T经过A这个矩阵变换后,变成了向量v(-3,0,2)。   以2维的线性方程组为例,对于A这个变换可能存在两种情况:一种是通过变换后降低维度、另一种是对应行列式不为0,的一个普通变换。 以2维的线性方程组为例,对于A这个变换可能存在两种情况:一种是通过变换后降低维度、另一种是对应行列式不为0,的一个普通变换。   当行列式不为0时候最容易讨论,在这种情况下原空间下有且仅有一个向量与v重合,我们可以通过逆向变换来找到这个向量。 先来说说这个逆矩阵 当行列式不为0时候最容易讨论,在这种情况下原空间下有且仅有一个向量与v重合,我们可以通过逆向变换来找到这个向量。 先来说说这个逆矩阵   比如将整个空间逆时针旋转90度的线性变换A,和将空间顺时针转90度的线性变换B就是一组逆变换。 比如将整个空间逆时针旋转90度的线性变换A,和将空间顺时针转90度的线性变换B就是一组逆变换。  可逆的定义都清楚。从几何直观的角度想一想原因:经过两次变换后,两个向量还是两个指着x,y轴的单位向量。这就代表经过这两次变换后“什么都没有做”。 综上,对于行列式不为0的变换,我们求出它的逆矩阵,再用v左乘逆矩阵即可求出x。 (对于行列式非0的情况,三维方程组的原理相同,不再赘述) 然而对于行列式为0的情况,先以2维为例(r(A)=1),意味着二维平面的空间被压缩成了一条线 可逆的定义都清楚。从几何直观的角度想一想原因:经过两次变换后,两个向量还是两个指着x,y轴的单位向量。这就代表经过这两次变换后“什么都没有做”。 综上,对于行列式不为0的变换,我们求出它的逆矩阵,再用v左乘逆矩阵即可求出x。 (对于行列式非0的情况,三维方程组的原理相同,不再赘述) 然而对于行列式为0的情况,先以2维为例(r(A)=1),意味着二维平面的空间被压缩成了一条线   同样的,也可以想明白,2D平面中的多个向量会被映射到同一个向量上。 这时候就会出现如下的问题: 同样的,也可以想明白,2D平面中的多个向量会被映射到同一个向量上。 这时候就会出现如下的问题:  如果你所求的v向量在这个线性变换后的张成空间的直线上,那么解一定存在,并且根据上面的说法,解一定是不唯一的。而如果v向量不在张成空间的直线上,那么就无解了。 如果你所求的v向量在这个线性变换后的张成空间的直线上,那么解一定存在,并且根据上面的说法,解一定是不唯一的。而如果v向量不在张成空间的直线上,那么就无解了。
对于3D来说,一个变换会产生的情况要复杂一些:我们需要引入秩(rank)来描述这个问题。 当变换结果是一条线,我们称r(A)=1; 
当变换结果是一个平面,我们称r(A)=2;  当变换后仍是三维空间,则称r(A)=3 当变换后仍是三维空间,则称r(A)=3  我们引入列空间的定义——av所有可能的输出向量的集合称为列空间 我们引入列空间的定义——av所有可能的输出向量的集合称为列空间  我们把最后变化到原点的空间集合称为——零空间或核 我们把最后变化到原点的空间集合称为——零空间或核  
07-点积、对偶性
点积
点积的定义:两个维数相同的向量各项相乘再相加:  V·W的几何意义是W在V向量上的投影长度与v的长度相乘: V·W的几何意义是W在V向量上的投影长度与v的长度相乘:  当然,若出现两相乘向量方向相反的情况,应当添加一个负号: 当然,若出现两相乘向量方向相反的情况,应当添加一个负号:  当两向量相互垂直时,点乘的结果为0。 当两向量相互垂直时,点乘的结果为0。  虽然有这种几何意义,但是点积显然是无序的,也就是说当相乘顺序颠倒后,也就是说变成了v向w投影,依旧不会改变计算结果。 虽然有这种几何意义,但是点积显然是无序的,也就是说当相乘顺序颠倒后,也就是说变成了v向w投影,依旧不会改变计算结果。  可为什么点积是无序的呢,这个几何意义又是怎么来的呢?我们需要仔细讨论一下这个事情: 先从最简单的情况开始考虑,如果v和w是对称的,他们的投影也互为对称的,易证结论成立。 可为什么点积是无序的呢,这个几何意义又是怎么来的呢?我们需要仔细讨论一下这个事情: 先从最简单的情况开始考虑,如果v和w是对称的,他们的投影也互为对称的,易证结论成立。  若我们考虑2v,也就是将对称性破坏时 若我们考虑2v,也就是将对称性破坏时   w在v上进行投影,结果如上;将v在w投影,结果如下,可以看到两者的计算结果是相同的。 w在v上进行投影,结果如上;将v在w投影,结果如下,可以看到两者的计算结果是相同的。  所以说即使对称性被破坏,缩放向量对于点积的影响是相同的。 所以说即使对称性被破坏,缩放向量对于点积的影响是相同的。
08-叉积的介绍
 叉积的定义:V×W等价于向量N其中方向取垂直于V与W的方向(注意遵循右手定则)大小为V与W张成的平行四边形面积 叉积的定义:V×W等价于向量N其中方向取垂直于V与W的方向(注意遵循右手定则)大小为V与W张成的平行四边形面积    这是我们熟悉的计算公式,但如何用几何直观解释这个行列式呢? {待补充} 这是我们熟悉的计算公式,但如何用几何直观解释这个行列式呢? {待补充}
09-基坐标与坐标转换
 显然,同一个向量在不同基下的坐标是不同的 下面举个例子: 显然,同一个向量在不同基下的坐标是不同的 下面举个例子:  对于如上的b1和b2在我们(i,j为基)眼中,他的坐标如上图,但是在这个基的眼中,如下图所示 对于如上的b1和b2在我们(i,j为基)眼中,他的坐标如上图,但是在这个基的眼中,如下图所示  显然这是由于对于基的定义不同导致的 显然这是由于对于基的定义不同导致的  对于紫色方的坐标,如果我们想知道他说的[-1,2]在我这(蓝色方)是指哪个向量,由于我知道他的基坐标在我这的向量,我只需要要将它的基坐标做线性组合即可,具体计算如下: 对于紫色方的坐标,如果我们想知道他说的[-1,2]在我这(蓝色方)是指哪个向量,由于我知道他的基坐标在我这的向量,我只需要要将它的基坐标做线性组合即可,具体计算如下:  这样就实现了坐标的转化。这其实就是第三节学到的左乘矩阵的线性变化。 那么对于我们想的坐标,比如[-1,2]在紫色方的坐标是什么呢? 这样就实现了坐标的转化。这其实就是第三节学到的左乘矩阵的线性变化。 那么对于我们想的坐标,比如[-1,2]在紫色方的坐标是什么呢?  这其实就是一个逆运算,换位思考,我们只需要将紫色方的基坐标围成的矩阵求逆,再和我们的坐标相乘即可。 这其实就是一个逆运算,换位思考,我们只需要将紫色方的基坐标围成的矩阵求逆,再和我们的坐标相乘即可。    考虑如下一个具体的问题: 在前几节我们学过一个逆时针旋转90度的线性变化矩阵 考虑如下一个具体的问题: 在前几节我们学过一个逆时针旋转90度的线性变化矩阵  对于紫色方,如果它也想使它的向量实现这样的操作,应该怎么办呢? 对于紫色方,如果它也想使它的向量实现这样的操作,应该怎么办呢? 
显然,我们是不能直接左乘那个矩阵的,因为那个是在我们的基坐标下进行的变换  图上是一个可行的方法,我们先将它的坐标左乘它的基坐标矩阵,使该向量用我们的基坐标描述,再去左乘旋转矩阵实现旋转,然后再乘基向量矩阵的逆矩阵,将坐标变换回去。这样就实现了在它的坐标中旋转90度这一操作。 图上是一个可行的方法,我们先将它的坐标左乘它的基坐标矩阵,使该向量用我们的基坐标描述,再去左乘旋转矩阵实现旋转,然后再乘基向量矩阵的逆矩阵,将坐标变换回去。这样就实现了在它的坐标中旋转90度这一操作。  这个操作好啊,只需要改变中间的那个矩阵,就能轻松实现对于紫色方坐标的任意变换 并且这个P-1AP实现的是一个坐标系转换的功能,下一节我们会详谈这个事情 这个操作好啊,只需要改变中间的那个矩阵,就能轻松实现对于紫色方坐标的任意变换 并且这个P-1AP实现的是一个坐标系转换的功能,下一节我们会详谈这个事情 
10-特征值与特征向量
 大多数向量经过一个线性变换后方向都会改变,我们把通过一个线性变换后只改变大小不改变方向的向量称为特征向量,这个向量放缩的比例称为特征值 大多数向量经过一个线性变换后方向都会改变,我们把通过一个线性变换后只改变大小不改变方向的向量称为特征向量,这个向量放缩的比例称为特征值   显然,特征值可以是负数 显然,特征值可以是负数   (相当于一个翻转) 一个比较使用的例子就是:对于三维的空间中的一个旋转,找到了特征向量就相当于找到了旋转轴(当然这里的特征值一定是1,因为这只是一个单纯的旋转并没有放缩) (相当于一个翻转) 一个比较使用的例子就是:对于三维的空间中的一个旋转,找到了特征向量就相当于找到了旋转轴(当然这里的特征值一定是1,因为这只是一个单纯的旋转并没有放缩)   
对于求特征值的方法的推理便不再赘述,难点在于下方这个:  为何某个矩阵通过P-1AP的变化(其中P是由特征向量构成)一定能变化成一个对角矩阵(矩阵的值是特征值)呢? 考虑上一节提到的基变化的思想,A是某个线性变换,左右乘P-1和P是为了将这个变化作用于P这个基,观察这个变换在P这个坐标系中是如何变换的。由于A这个变换对于P来说在前后没有改变方向只是改变了大小,所以一定是个对角矩阵 为何某个矩阵通过P-1AP的变化(其中P是由特征向量构成)一定能变化成一个对角矩阵(矩阵的值是特征值)呢? 考虑上一节提到的基变化的思想,A是某个线性变换,左右乘P-1和P是为了将这个变化作用于P这个基,观察这个变换在P这个坐标系中是如何变换的。由于A这个变换对于P来说在前后没有改变方向只是改变了大小,所以一定是个对角矩阵
三、结语
还是非常建议大家去看一下原版的视频来消化理解,作者深入浅出,相信你看过之后也会爱上数学。 参考资料:3Blue1Brown——Essence of linear algebra
|