Apollo开放平台文档 |
您所在的位置:网站首页 › bplus标定开关 › Apollo开放平台文档 |
Apollo开放平台文档
|
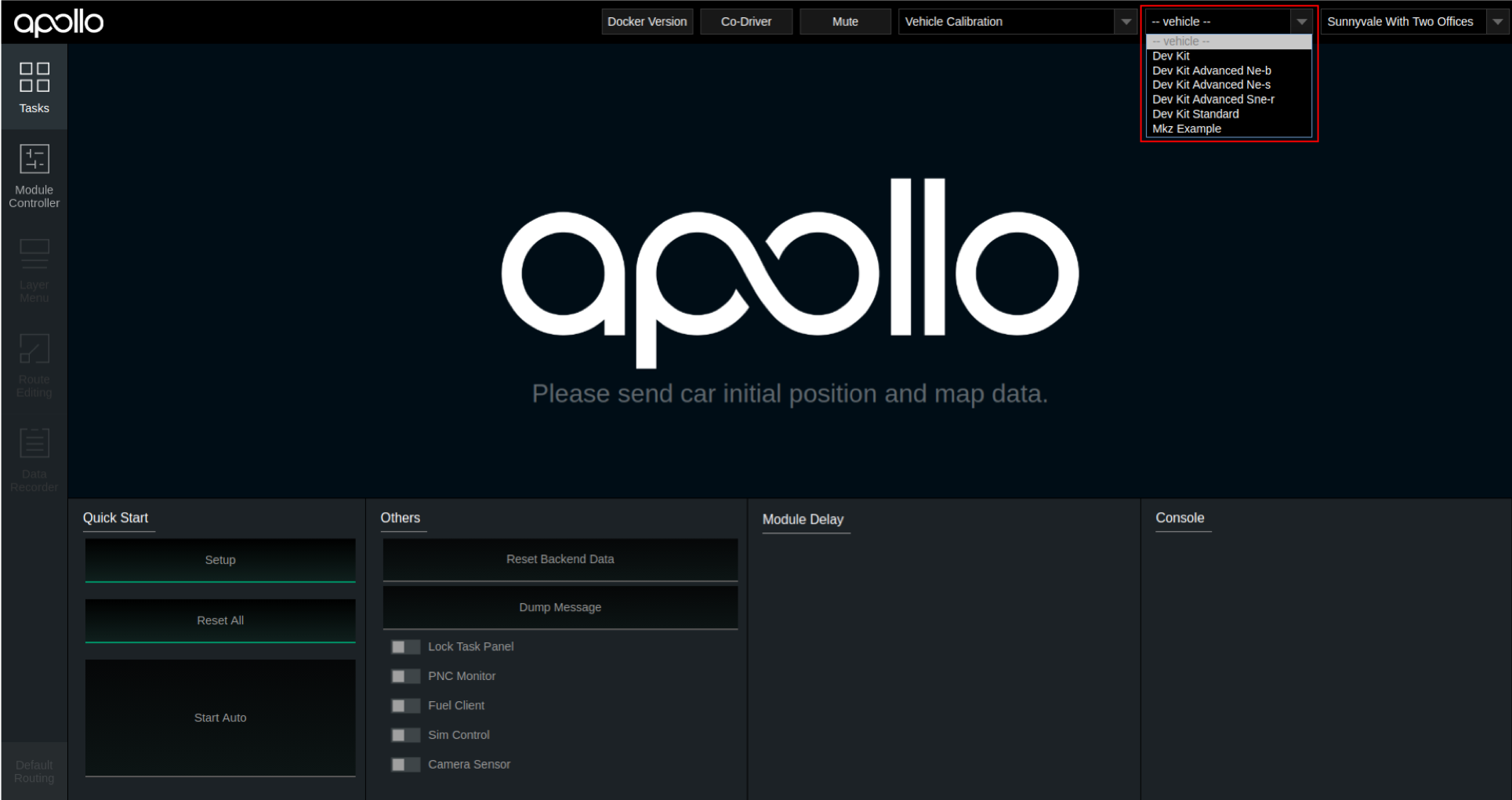
车辆云标定是通过采集车辆底盘油门踏板量、刹车踏板量、车辆速度、加速度作为车辆纵向动力模型的输入,通过机器学习的方式,生成相应车辆的踏板标定表。生成的标定表数据量大、精度高,提高车辆的控制精度。车辆踏板标定系统主要包括四个部分: 在 DreamView 数据采集监视器内采集标定数据; 数据本地预处理; 标定数据上传至 BOS 云盘,提交标定任务; 生成用于性能评估的可视化标定结果。 前提条件 循迹搭建--车辆集成 循迹搭建--定位模块配置 循迹搭建--Apollo 系统安装 开通云服务账号 步骤一、修改配置文件在开始标定前,需要根据实际车辆的最高速度、油门、刹车踏板的限制,进行用于车辆踏板标定的数据采集配置,来适配车辆的标定,满足标定数据能够尽可能多的覆盖车辆踏板的有效范围。我们设置了开发套件的默认车辆标定数据采集配置文件,在文件 apollo/modules/calibration/data/$vehicle_type/dreamview_conf/data_collection_table.pb.txt 内。对于不同的车型,配置文件的位置不同,主要由车型参数 $vehicle_type 决定,根据车辆铭牌信息选择对应的车型。 下面以 MKZ 车辆标定举例说明。MKZ 车辆标定标定配置文件在 apollo/master/modules/dreamview/conf/data_collection_table.pb.txt 内。 在您了解标定文件构成后,如有需要可以自行修改需要的数据采集配置文件。通常情况下,使用默认标定配置可以覆盖小车大部分踏板控制范围。建议您不需要单独修改此配置文件,使用默认标定配置即可。默认标定配置文件内主要设计了小车的标定条件如下: 车辆前进模型 速度条件 低速 0 ~ 10m/s 中速 10 ~ 20m/s 高速 >= 20m/s油门条件 小油门 Throttle deadzone ~ 25% 中油门 25% ~ 30% 大油门 Throttle >= 30%刹车条件 小刹车 Brake deadzone ~ 20% 中刹车 20% ~ 25% 急刹车 Brake >= 25%上述的 Throttle deadzone 表示车辆油门踏板的不产生加速度的无效区段,开发者可以根据实际车辆的情况修改此参数;Brake deadzone 表示车辆刹车踏板的不产生减速度的无效区段,一般设在较低的踏板开度时,开发者可以根据实际车辆的情况修改此参数。此参数设置在 apollo/modules/common/data/vehicle_param.pb.txt 文件内 throttle_deadzone 和 brake_deadzone,在标定开始前,就要先把改参数确定好,后面进行数据训练时上传的配置文件,也需要对应使用该参数。 根据如上标定条件,即可匹配出车辆的所有标定条件,共 12 种条件,分别为: 低速小油门 低速中油门 低速大油门 高速小油门 高速中油门 高速大油门 低速小刹车 低速中刹车 低速急刹车 高速小刹车 高速中刹车 高速急刹车确认好上述标定条件后,通常情况下使用默认标定配置可以覆盖小车大部分踏板控制范围。如果需要修改配置文件,则需要将apollo/master/modules/dreamview/conf/data_collection_table.pb.txt 中 Go Straight 部分配置进行修改,其它部分配置代码无需修改,无需删除,启动 DreamView 后重新选择车辆后配置生效,具体修改代码如下: frame_threshold: 20 // 帧有效阈值,连续满足标定条件的帧数大于等于该阈值时才会被记录 total_frames: 6000 // 设置每一个标定case数据帧总量,当前设置为4000帧,可根据实际情况调整,数据量越大采集标定数据时间越长 scenario { key: "Go Straight" value { feature { name: "Forward" range { criterion { field: "gear_location" comparison_operator: EQUAL value: 1 } } } feature { name: "Steering Angle" range { name: "Straight" criterion { field: "steering_percentage" comparison_operator: GREATER_THAN_OR_EQUAL value: -1 } criterion { field: "steering_percentage" comparison_operator: LESS_THAN value: 1 } } } feature { name: "Speed" range { name: "Speed 0 ~ 10mps" criterion { field: "speed_mps" comparison_operator: GREATER_THAN_OR_EQUAL value: 0.2 } criterion { field: "speed_mps" comparison_operator: LESS_THAN value: 10 } } range { name: "Speed 10 ~ 20mps" criterion { field: "speed_mps" comparison_operator: GREATER_THAN_OR_EQUAL value: 10 } criterion { field: "speed_mps" comparison_operator: LESS_THAN value: 20 } } range { name: "Speed >= 20mps" criterion { field: "speed_mps" comparison_operator: GREATER_THAN_OR_EQUAL value: 20 } } } feature { name: "Accelerator (Decelerator)" range { name: "Throttle deadzone ~ 25%" criterion { field: "throttle_percentage" comparison_operator: GREATER_THAN_OR_EQUAL vehicle_config: "throttle_deadzone" } criterion { field: "throttle_percentage" comparison_operator: LESS_THAN value: 25 } } range { name: "Throttle 25% ~ 30%" criterion { field: "throttle_percentage" comparison_operator: GREATER_THAN_OR_EQUAL value: 25 } criterion { field: "throttle_percentage" comparison_operator: LESS_THAN value: 30 } } range { name: "Throttle >= 30%" criterion { field: "throttle_percentage" comparison_operator: GREATER_THAN_OR_EQUAL value: 30 } } range { name: "Brake deadzone ~ 20%" criterion { field: "brake_percentage" comparison_operator: GREATER_THAN_OR_EQUAL vehicle_config: "brake_deadzone" } criterion { field: "brake_percentage" comparison_operator: LESS_THAN value: 20 } } range { name: "Brake 20% ~ 25%" criterion { field: "brake_percentage" comparison_operator: GREATER_THAN_OR_EQUAL value: 20 } criterion { field: "brake_percentage" comparison_operator: LESS_THAN value: 25 } } range { name: "Brake >= 25%" criterion { field: "brake_percentage" comparison_operator: GREATER_THAN_OR_EQUAL value: 25 } } } } } 步骤二、标定数据采集 1. 准备完成配置文件修改后,将车辆移动至适合标定的场地后,启动 Apollo,并执行以下命令: bash apollo.sh build_opt_gpu # 重新编译使配置更改生效 bash scripts/bootstrap.sh 在浏览器打开 DreamView (http://localhost:8888)。 在 --setup mode-- 内,选择 vehicle calibration(车辆标定)模式。在 --vehicle-- 选择相应车型。
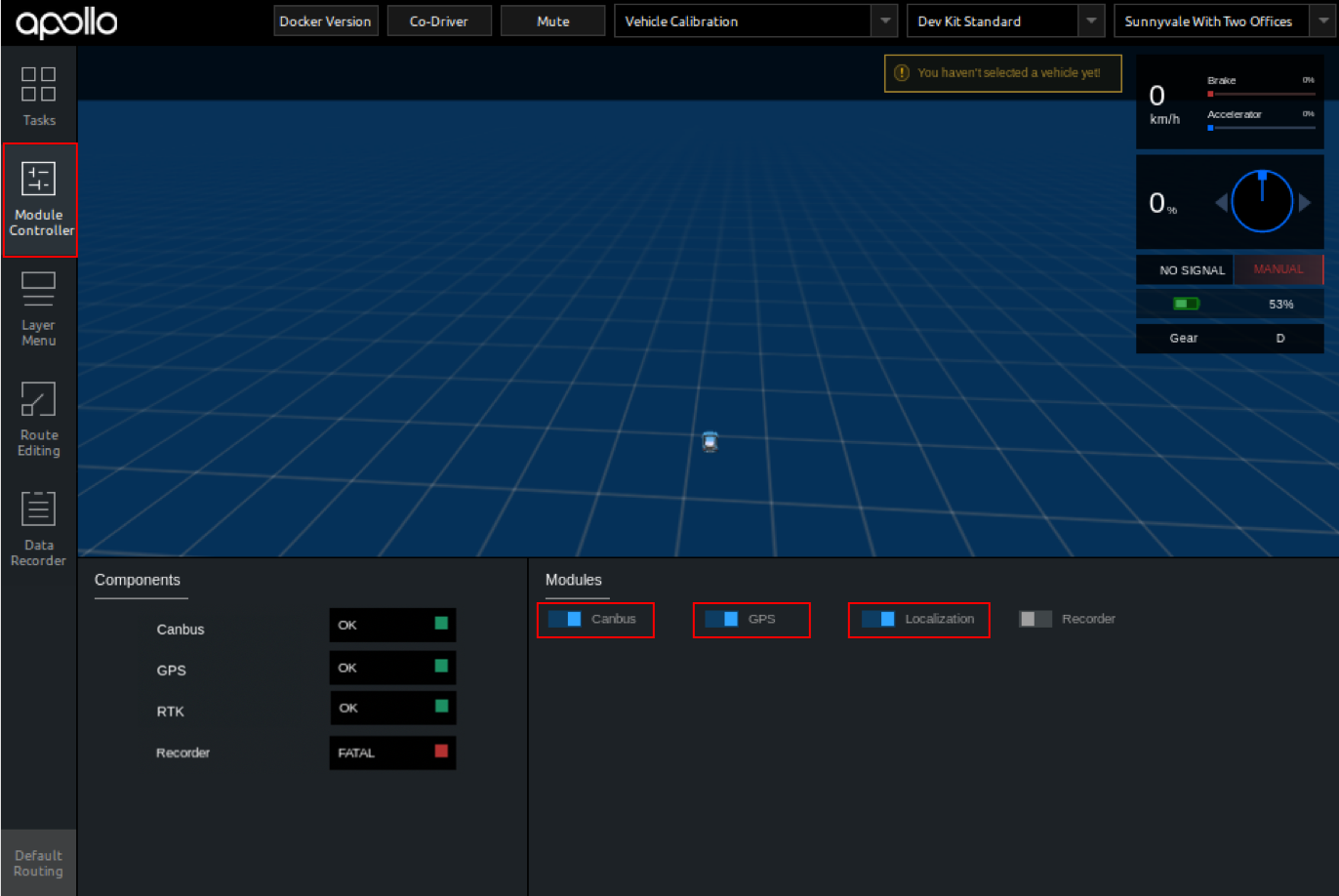
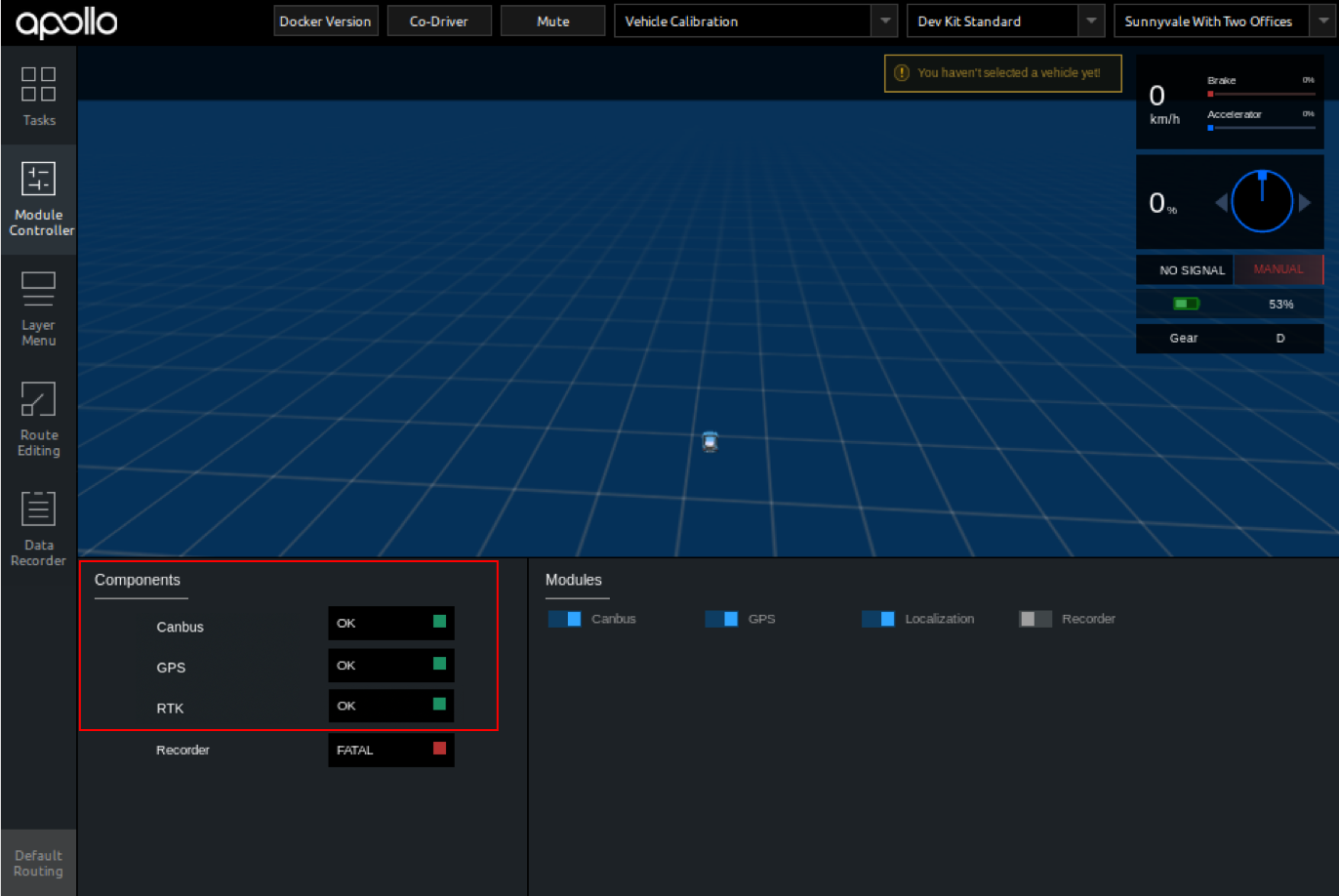
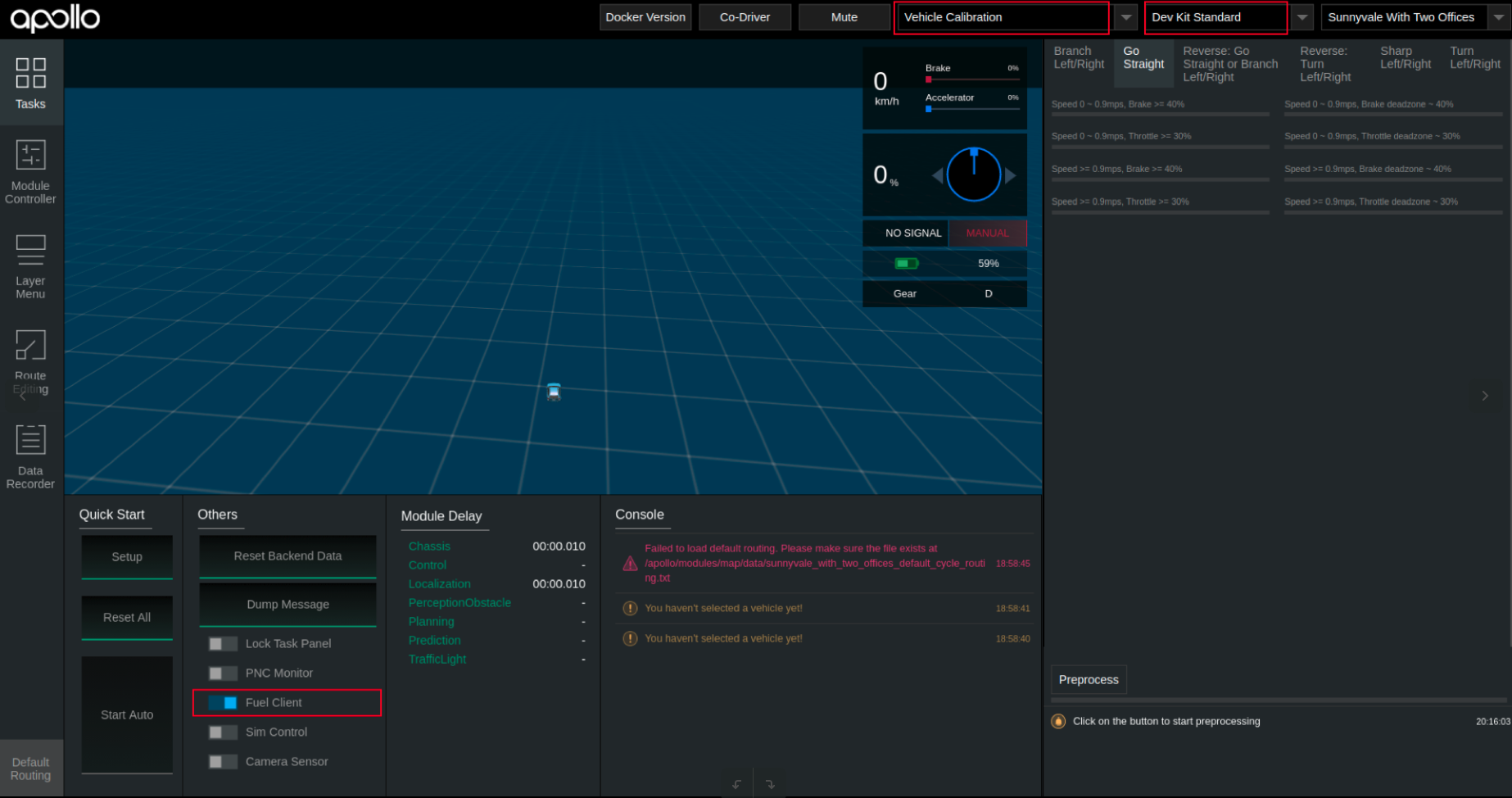
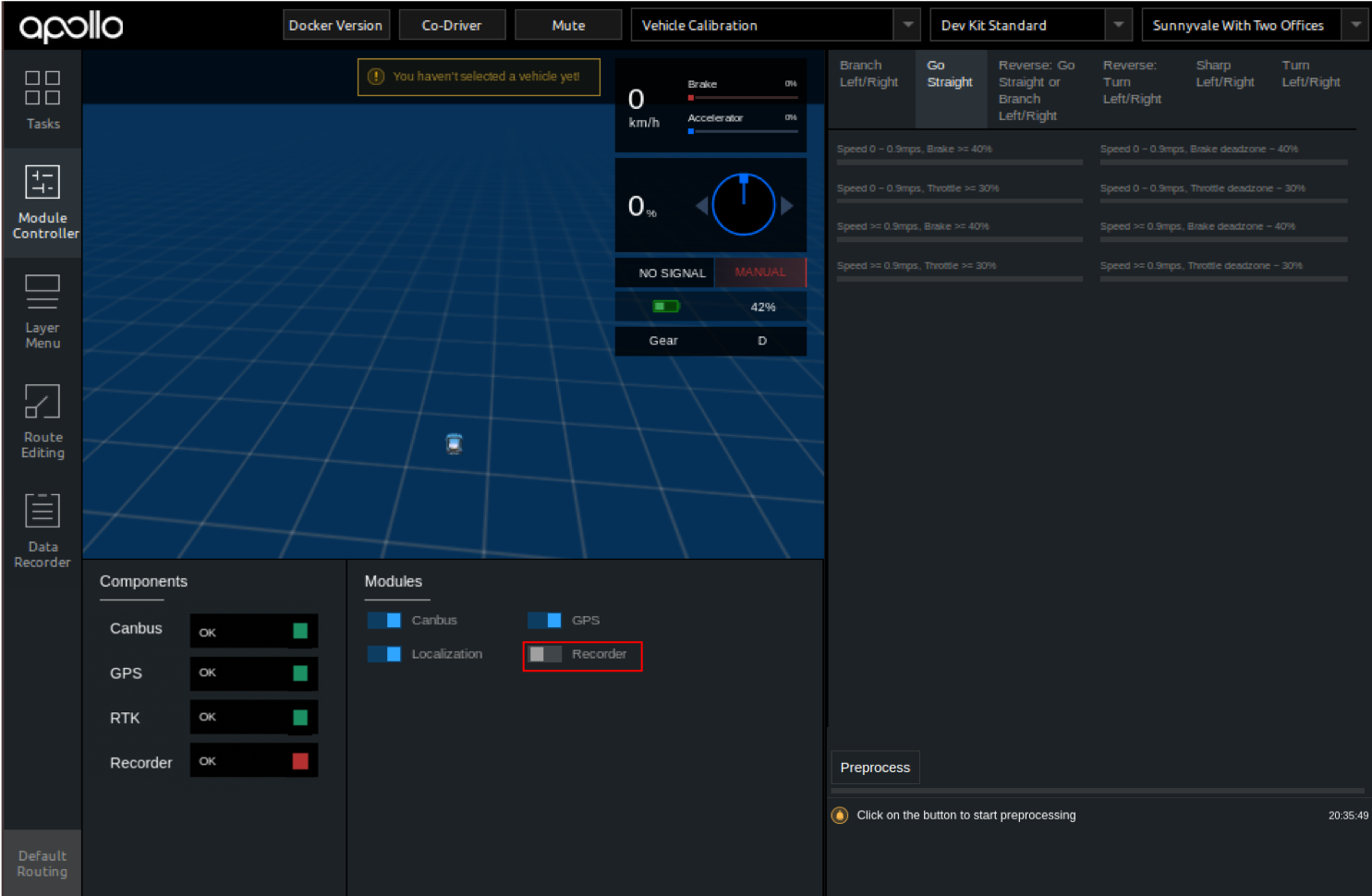
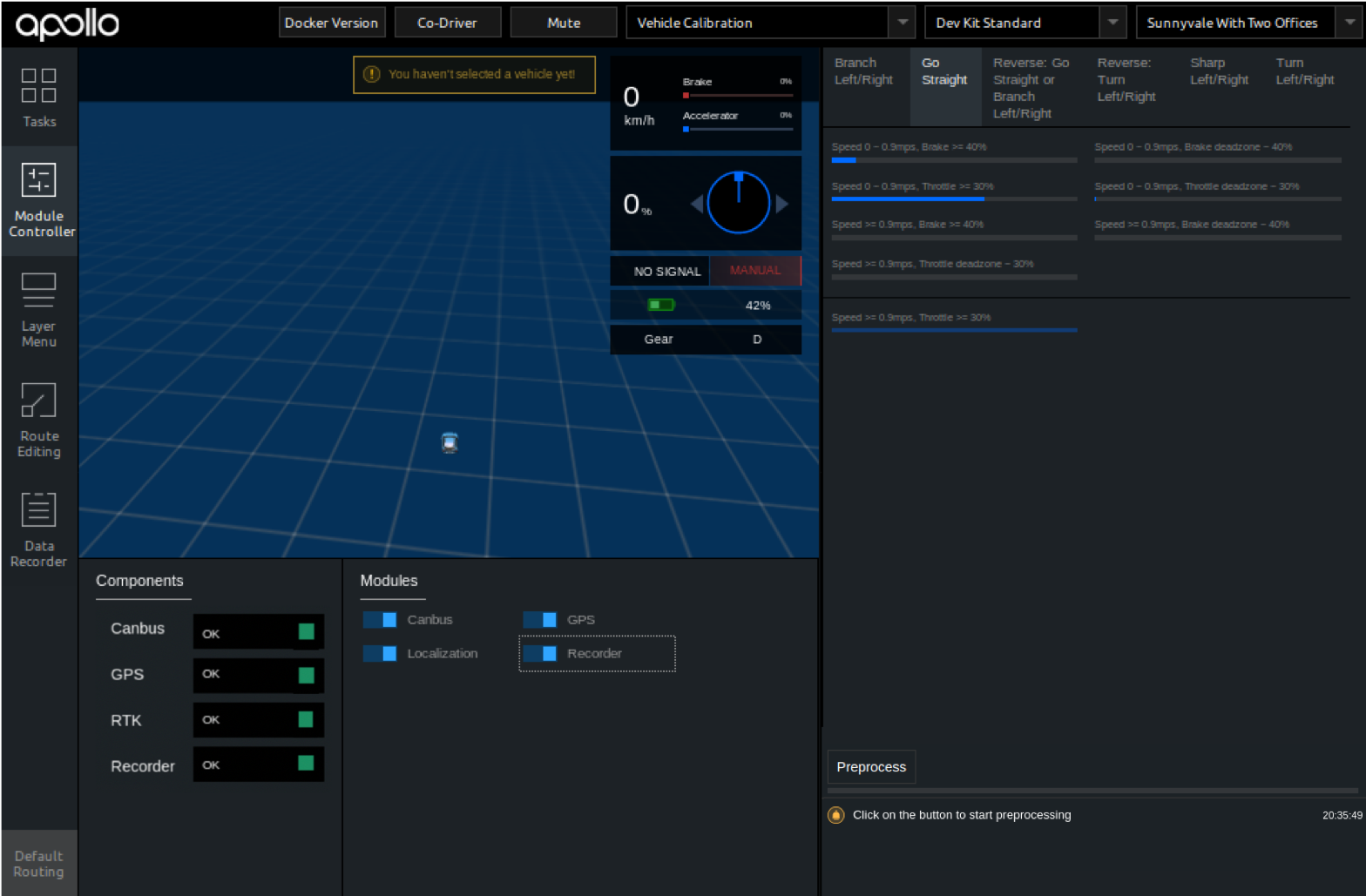
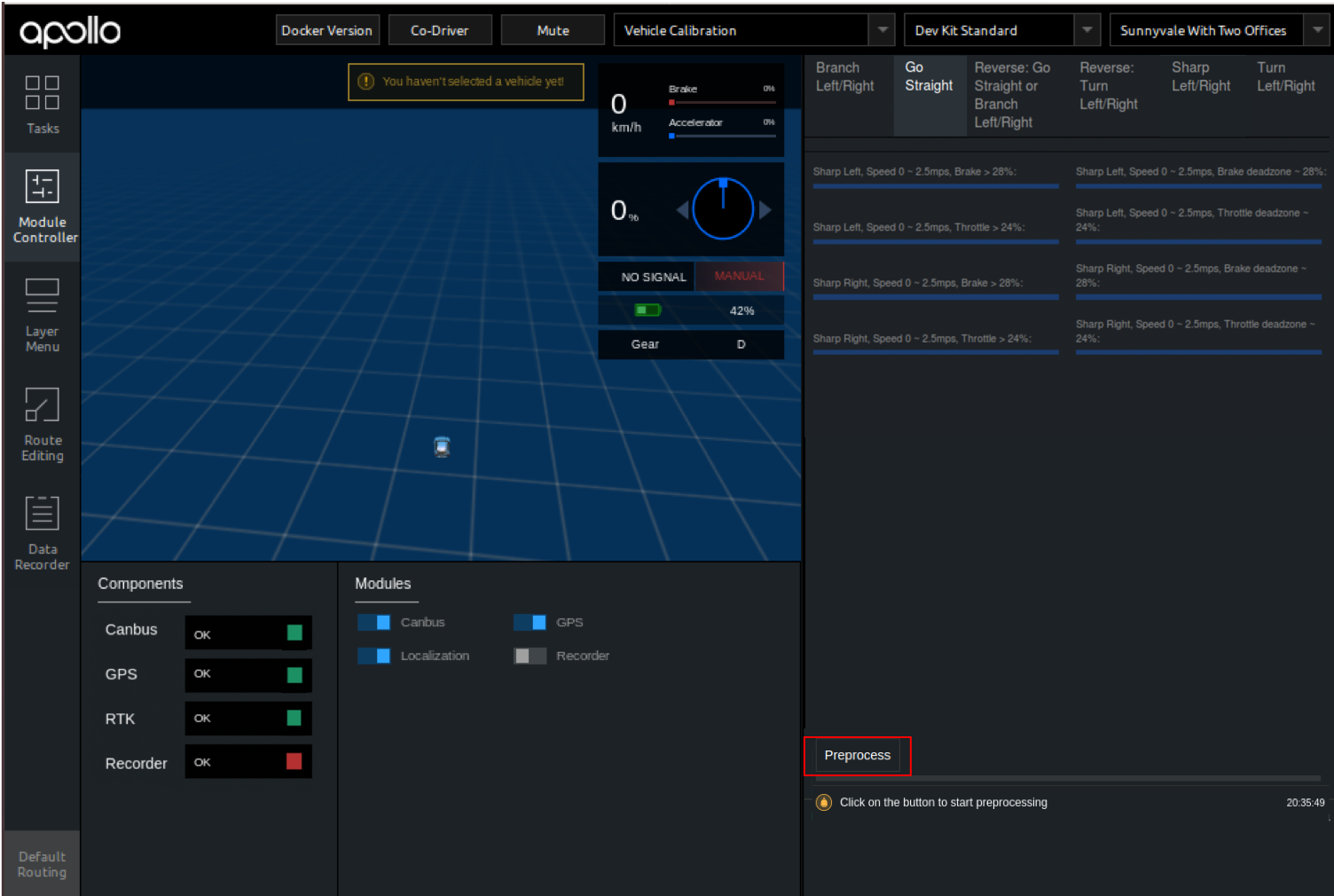
在进行标定前,需要采集包含车辆底盘、定位信息的数据作为输入,可以通过 DreamView 界面上的模块开关启动相关模块软件。在 DreamView 界面左侧边栏选择 Module Controller 标签,然后在主界面启动 Canbus、GPS、Localization 模块。 通过左侧 Components 查看 Canbus、GPS、RTK 状态,直到信号都达到 OK 才能够进行下一步。Localization 启动后,需要等待 1~2 分钟,RTK 状态才能变成 OK。 channel_name 检查项目 /apollo/canbus/chassis 确保能正常输出数据 /apollo/canbus/chassis_detail 确保能正常输出数据 /apollo/sensor/gnss/best_pose 确保能正常输出数据、sol_type: 选项显示为NARROW_INT /apollo/localization/pose 确保能正常输出数据 在确认上一步已经启动的软件模块状态 OK 后,点击 DreamView 界面左侧边栏 Tasks 标签,在 Others 区域,打开 Fuel Client 开关启动云服务采集界面,然后在界面右上侧选择 Go Straight 标签查看。 在 DreamView 界面点击左侧边栏,选择 Module Controller,点击 Recorder 开关, Apollo 系统开始录制记录车辆标定数据。 注意: 必须先打开 Recorder 开关,再进行标定数据采集操作,实际情况常常会因未打开 Recorder 开关造成数据未记录保存,影响效率。 如果在打开 Recorder 开关之前,右侧的数据采集器的进度条已经有一些增加,没有关系,因为在打开 Recorder 开关后会清除进度条的采集量,重新开始记录。 记录数据时,建议在第一次打开 Recorder 开关后,一次性把所有的标定 case 数据全部采集完之后再关闭 Recorder 开关,通常一次标定采集数据所用时间为 20-40 分钟,根据熟练程度、场地大小等决定。
这时手动驾驶车辆,根据 Dreamview 右侧数据采集监视器,采集相应标定条件的车辆数据,每符合标定条件一次,则进度条增加一点,直至进度条增加满为止。
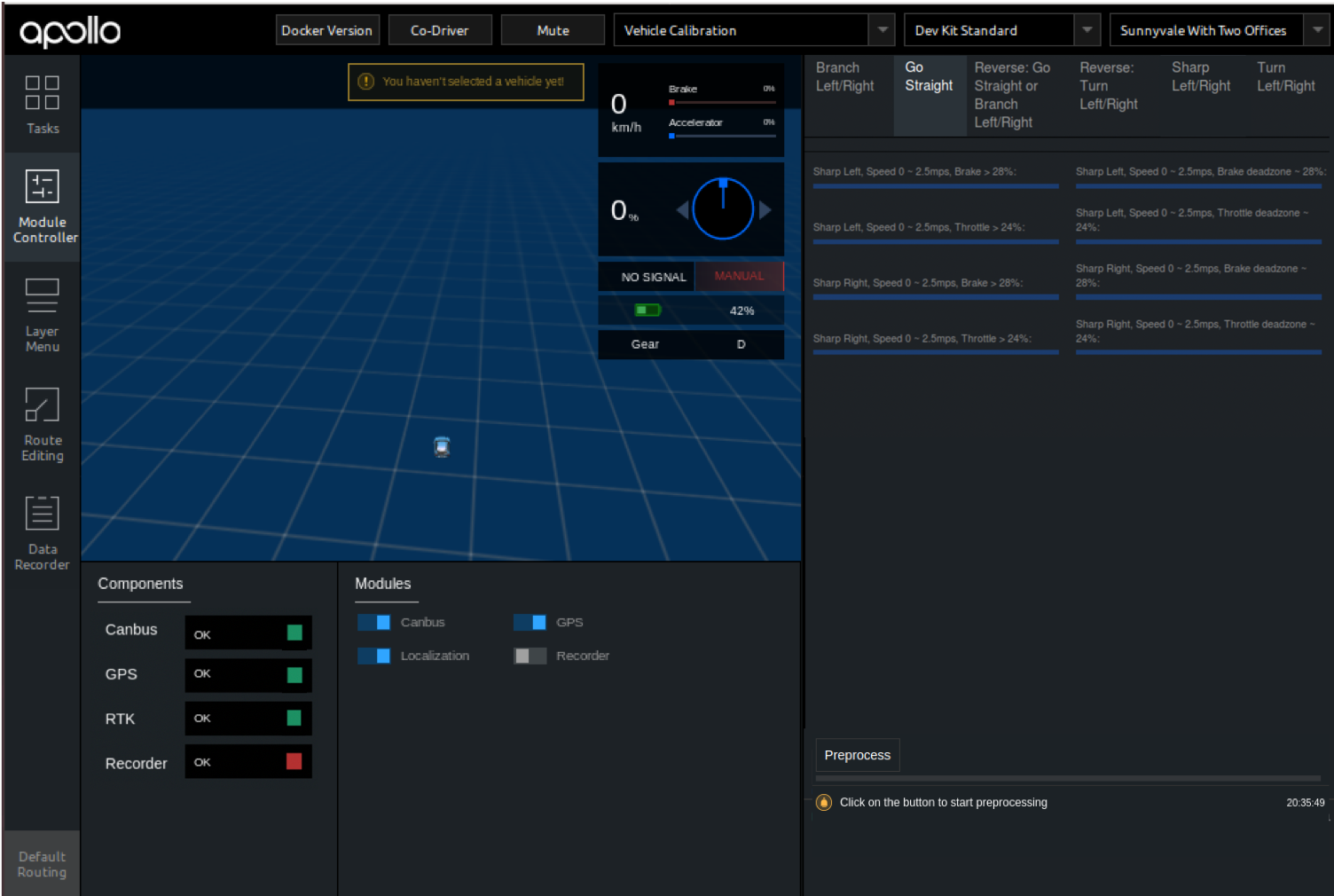
待监视器内各标定条件进度条(蓝色)全部采集完成后,点击关闭 Recorder,关闭数据记录,结束车辆标定数据采集。 注意:原则上进度条全部采集完对标定结果的生成是最佳的,您也可以根据实际情况采集进度条,实际根据场地大小限制,速度限制等。例如,有些 case 很容易采集满,有些很难,对于不好采集到的数据,可以采集到 60-80% 的状态也可以。
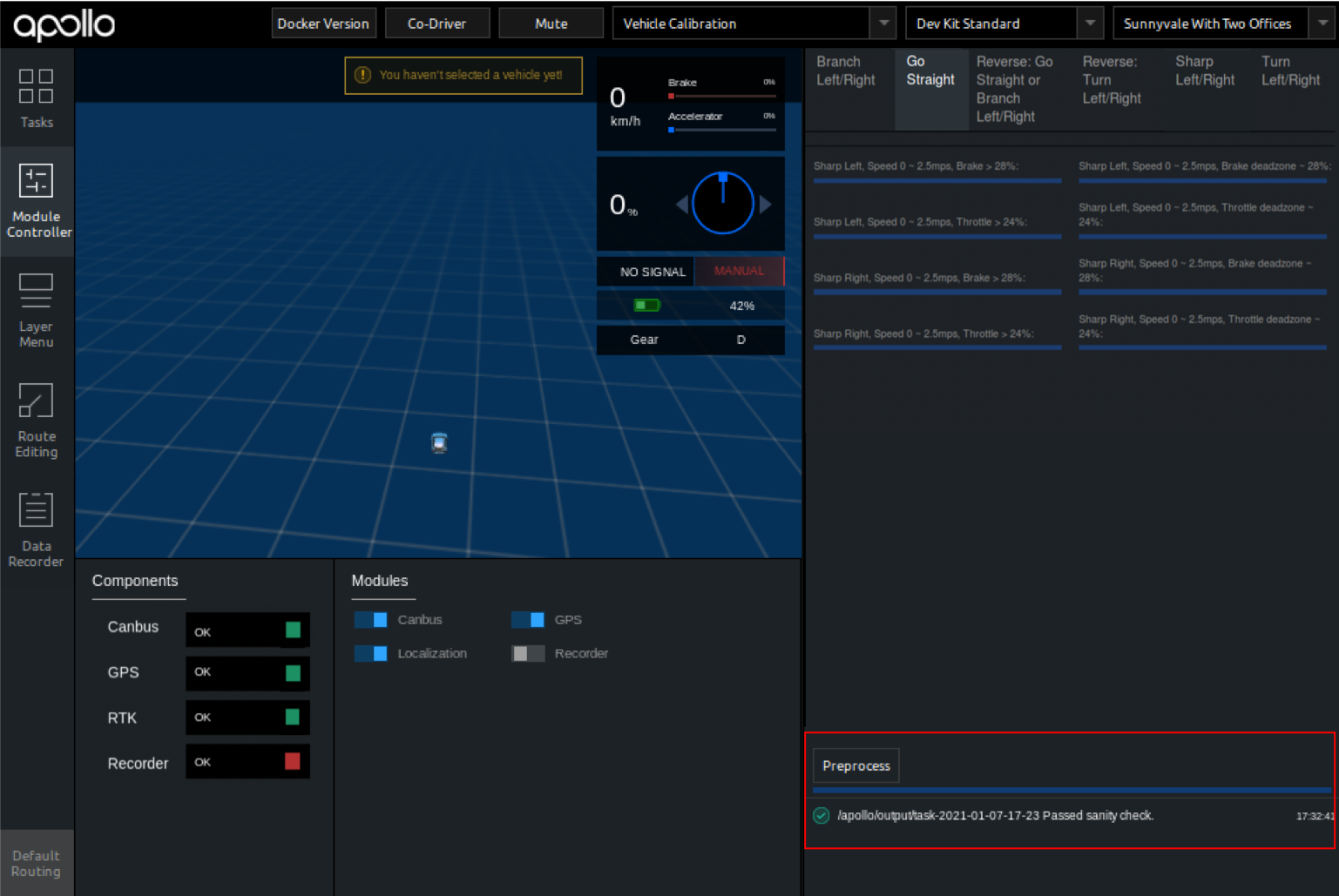
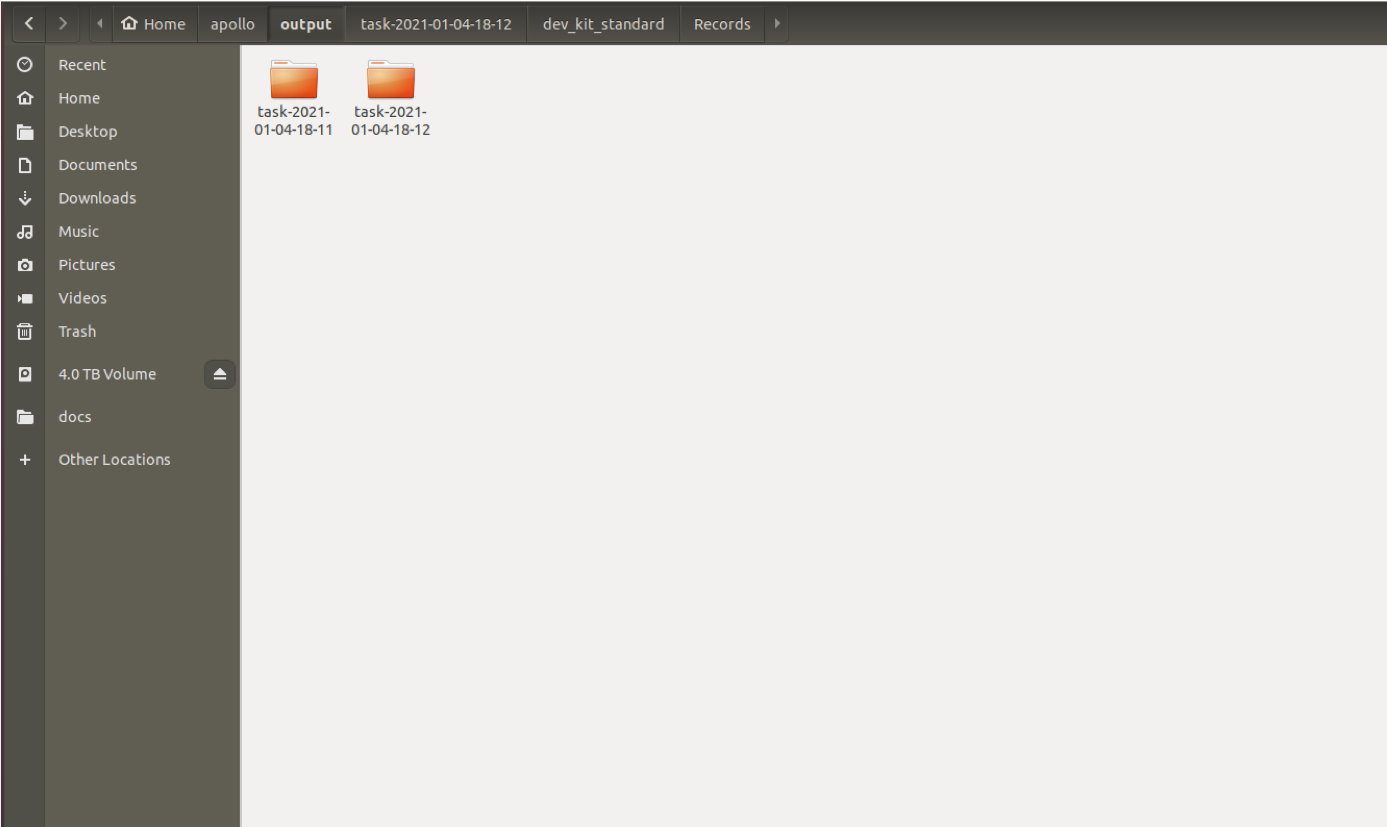
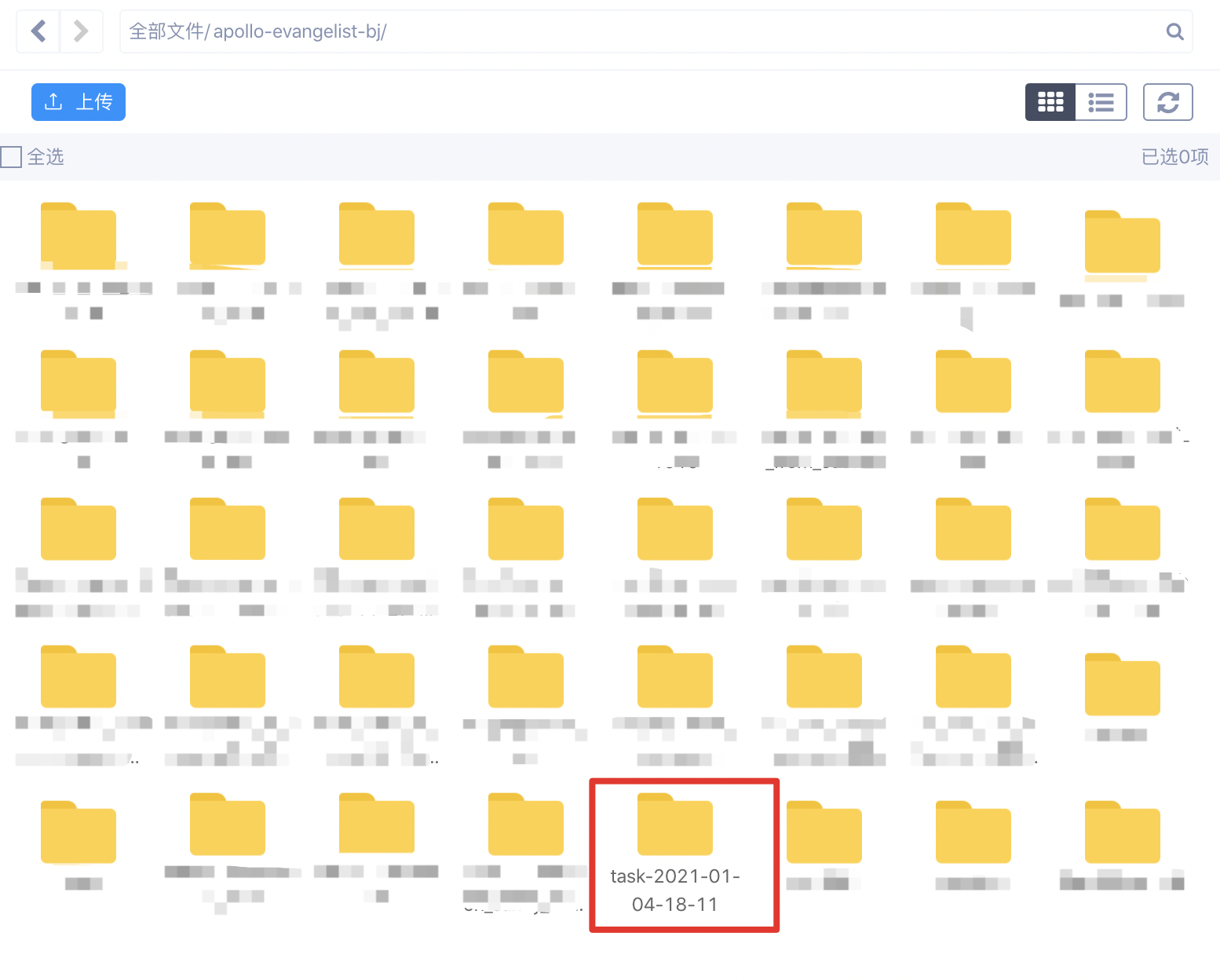
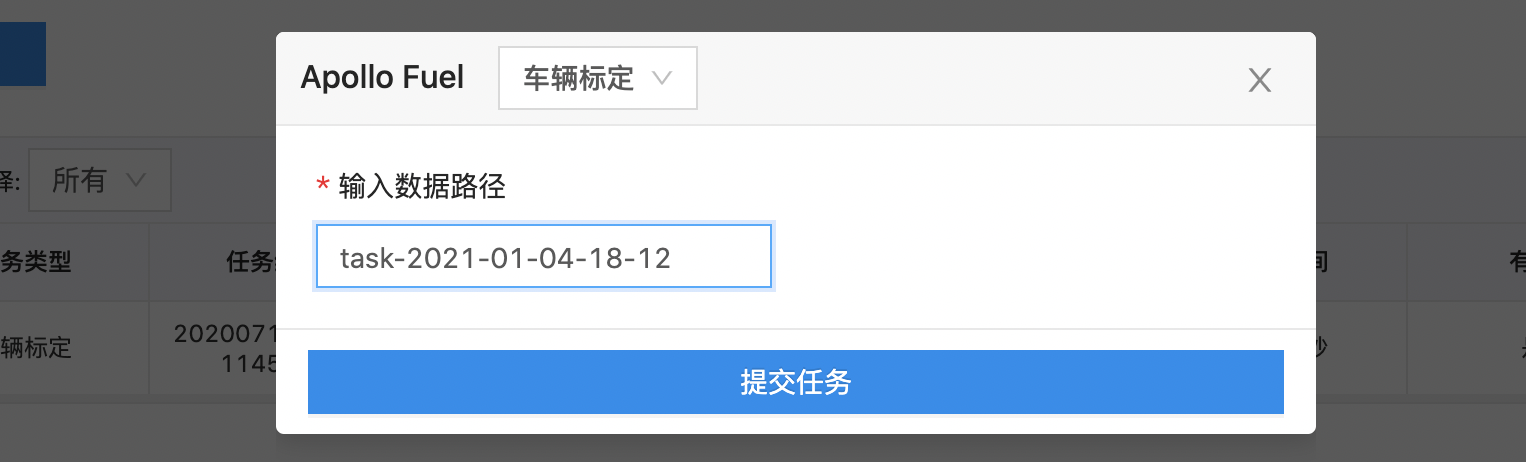
在上传数据之前,请注意以下几点: 标定数据预处理。采集完车辆的标定数据,关闭 Recorder 后,点击右下角 「Preprocess」 按钮,进行标定数据预处理。 点击 「Preprocess」 按钮后,首先对标定数据进行数据完整检查(sanity check),如果数据完整检查不通过,在进度条下方会有不通过的错误提示(通常情况下,按照文档上述步骤一步步做,完整性检查就不会有错)。 预处理按钮只需要点一次,不需要多次点击。 结束数据完整检查后,会提示将生成的预处理数据存入到 apollo/output/task-*******,文件夹以当时处理的时间为命名,所以开发者在 apollo/output 目录下查找时间最近的 task 文件夹即可。 如下图所示,拷贝预处理完成后的文件夹 task-2021-01-04-18-12,用于标定使用。 在 BOS 的初始目录,上传上一步选择的文件夹 task-2021-01-04-18-12。
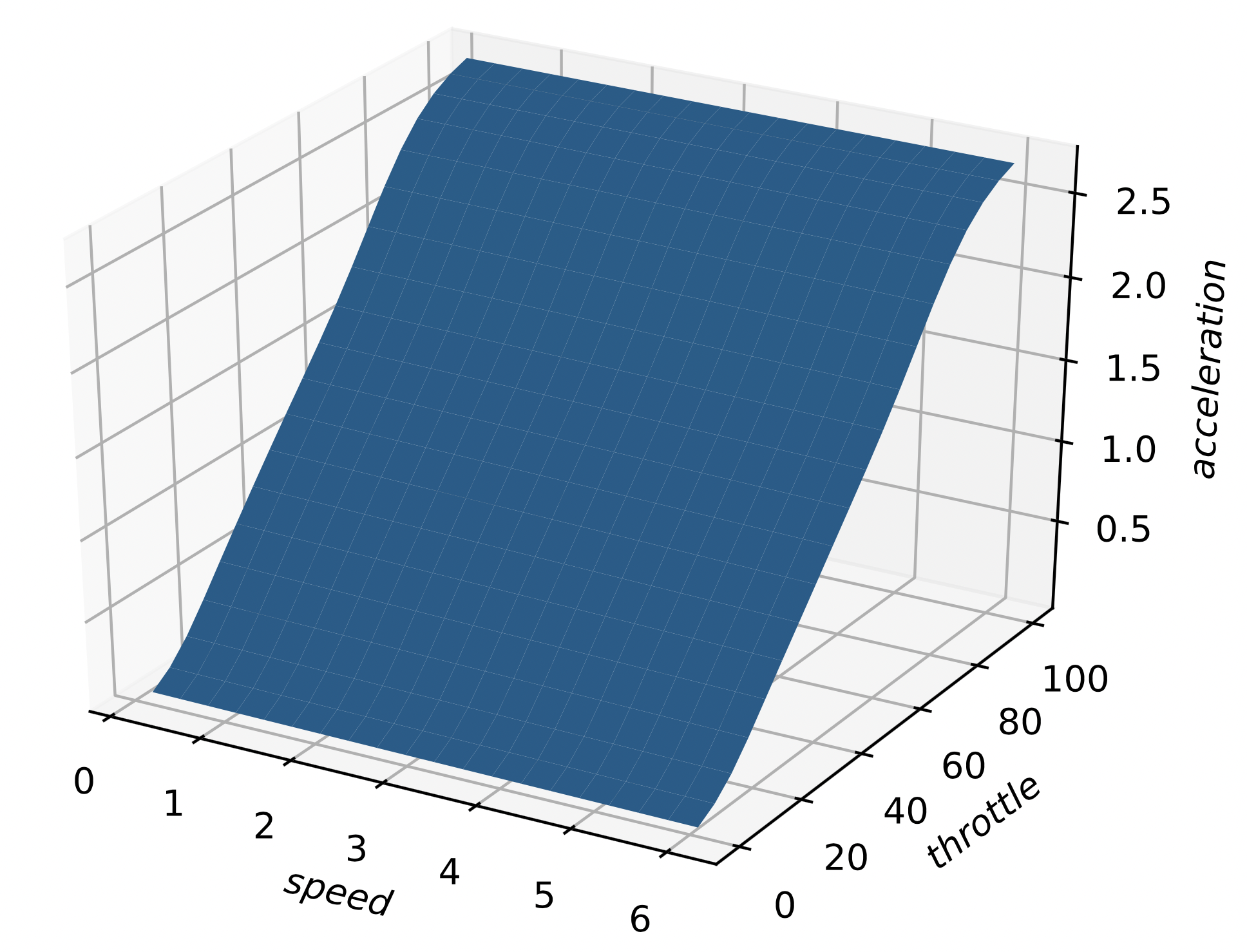
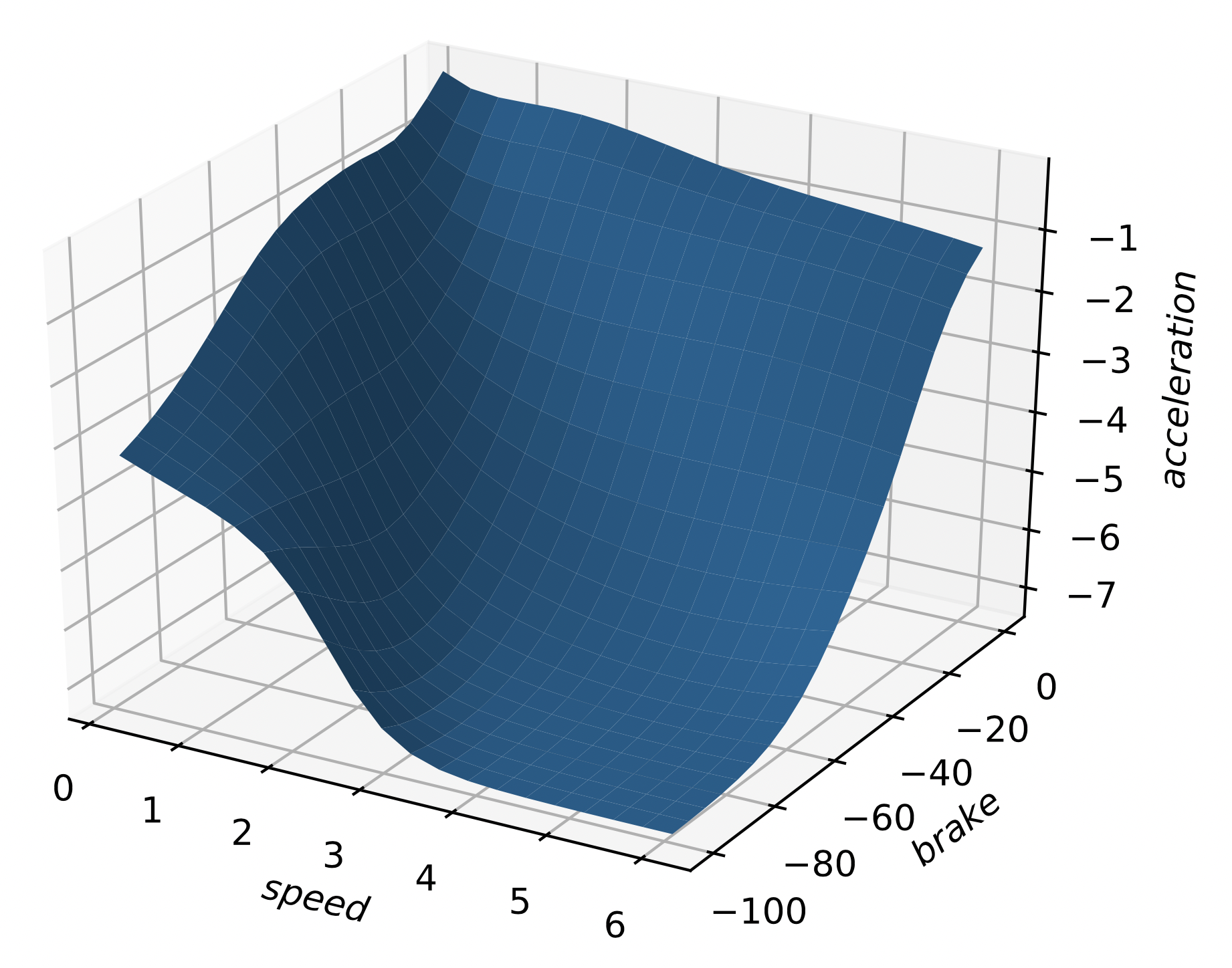
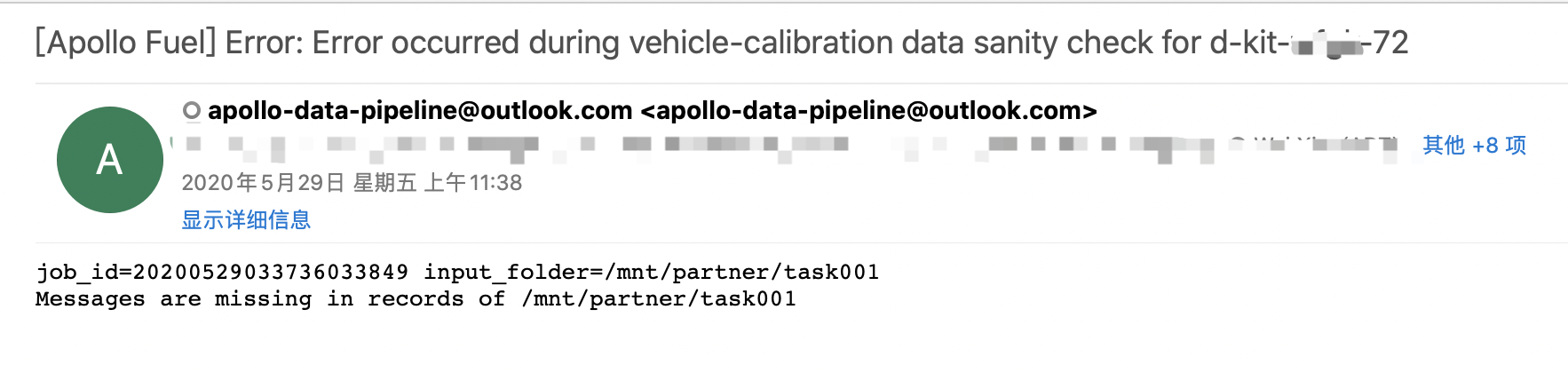
云标定任务完成后,您将在注册的邮箱(请与商务联系)中收到标定结果邮件。如果标定任务成功,将包含标定表及标定结果图片。 4. 将标定表写入控制配置文件中生成的标定表以 车型_calibration_table.pb.txt 命名,将标定表内的标定数据为 calibration_table 字段,把全部数据拷贝替换至 apollo/modules/control/conf/control_conf.pb.txt 下对应的 lon_controller_conf 字段下面的 calibration_table 段内。 以下为云标定数据片段示例(截取了前4段): calibration { speed: 0.0 acceleration: -1.3040223121643066 command: -69.0 } calibration { speed: 0.0 acceleration: -1.2989914417266846 command: -65.63157894736842 } calibration { speed: 0.0 acceleration: -1.2903447151184082 command: -62.26315789473684 } calibration { speed: 0.0 acceleration: -1.2760969400405884 command: -58.89473684210526 } 步骤四、结果显示标定表和结果以邮件的形式,发送至与 BOS 存储绑定的电子邮箱中。 油门踏板标定结果 车辆云标定能够提供精度较高的车辆踏板标定表,对于自动驾驶的控制精度有显著提升。当然,目前车辆的出厂一致性较好,在对控制精度要求不高的前提下,D-KIT 配置表内默认的标定数据,也可以进行正常循迹等闭环自动驾驶演示。 现在,您已经完成车辆动力学标定,接下来可以开始 车辆循迹演示。 常见问题 在进行车辆标定时,收到如下报错邮件,数据完整性检查出现错误
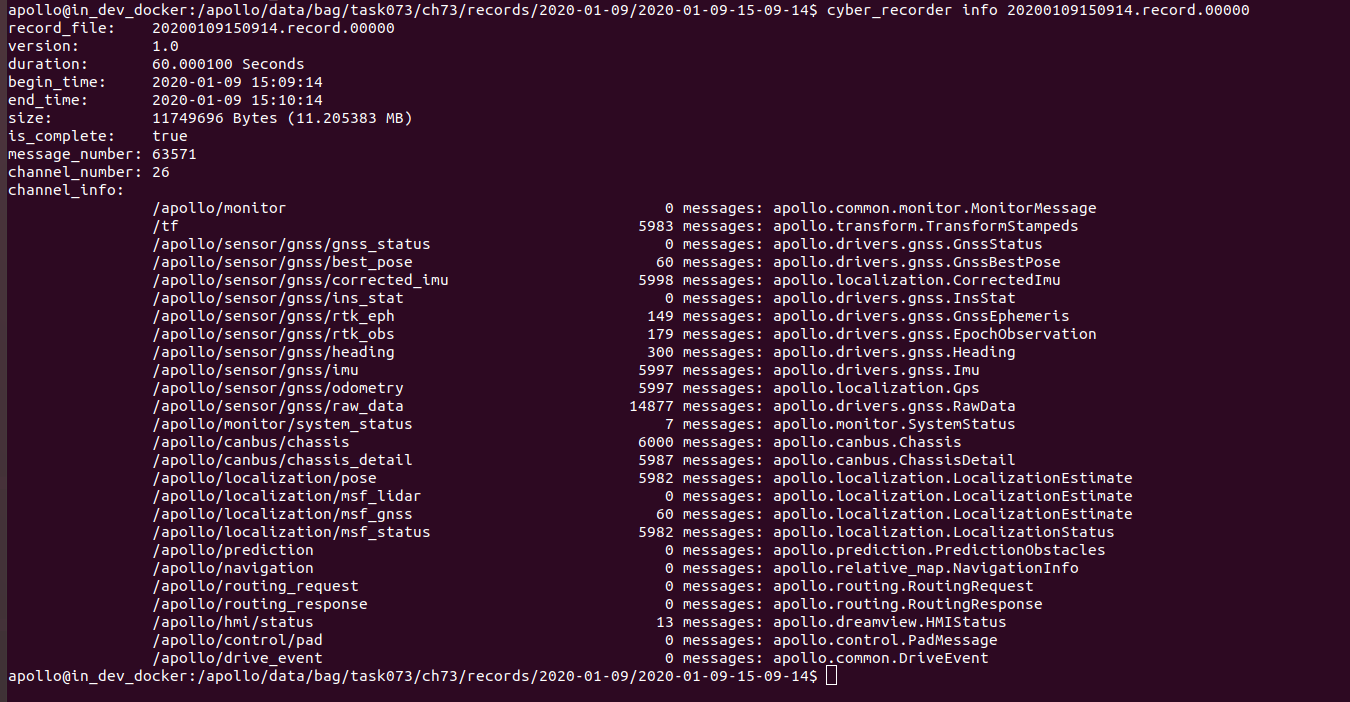
排查方法: 查看 文件夹结构 是否正确。一般数据预处理时,会自动生成文件夹目录,如果文件夹目录存在错误,可以手动参考如下图目录自行修改。 所有采集的标定数据都保存在 apollo/data/bag/ 目录下,找到以 年-月-日-时-分-秒 命名的文件夹,根据时间找到属于车辆标定采集的数据。我们可以分批采集数据,即每一次可以采集一部分数据,这样数据会记录在不同的 年-月-日-时-分-秒 文件夹(注意:默认情况下,数据采集后会在 apollo/data/bag/ 文件夹下生成 2 个 年月日时分秒相似 的文件夹,分别以 年-月-日-时-分-秒 和 年-月-日-时-分-秒_s 命名,开发者可以不用理会 _s 后缀的文件夹,只需要使用 年-月-日-时-分-秒 文件夹内录制的标定数据即可),也可以一次全部采集,这样所有的数据都记录在同一个文件夹内,通常完成上述标定条件的车辆标定数据采集需要 20 分钟左右。 1)正确的文件夹结构如下图所示: 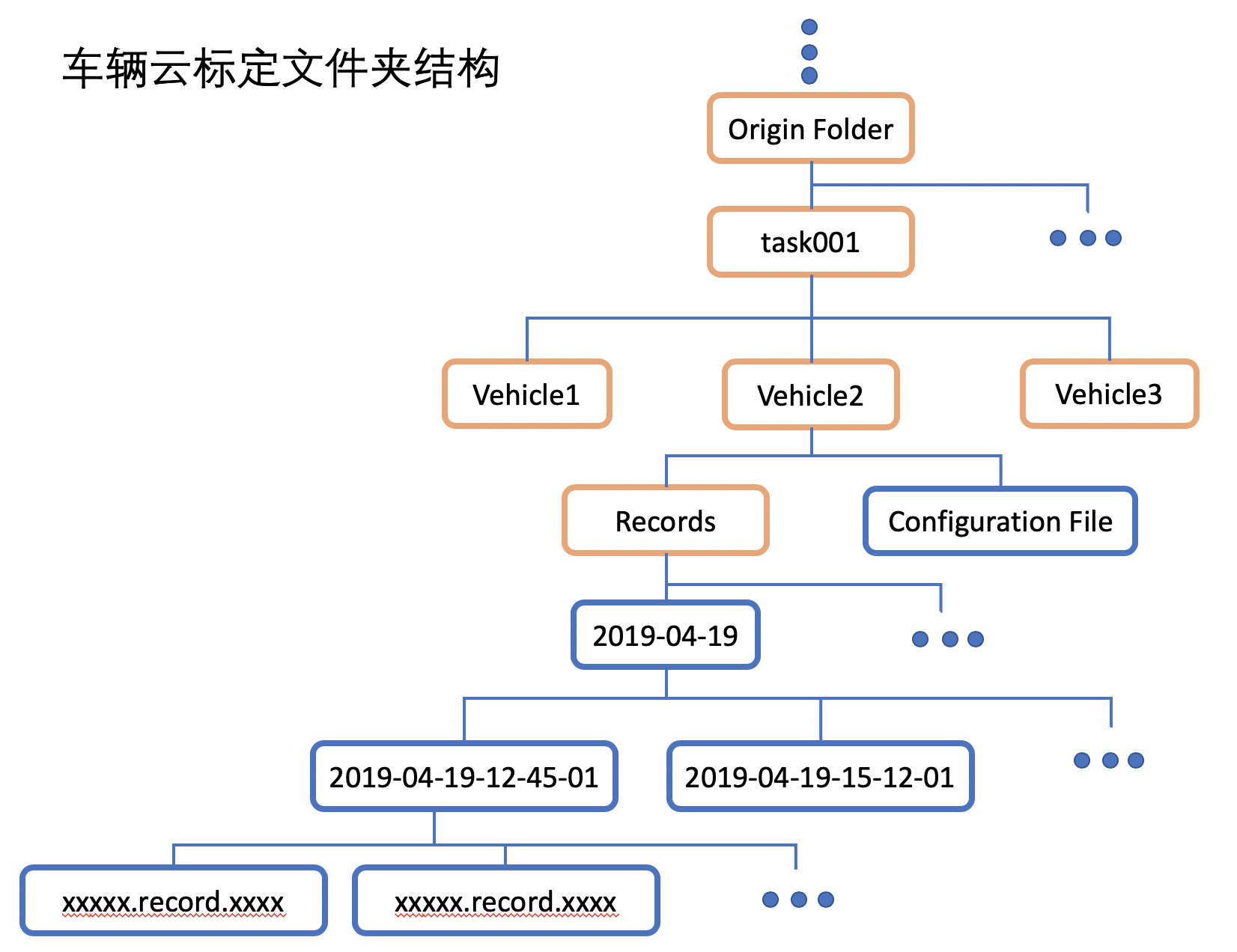2)Origin Folder 确保是 BOS 的根目录,确保 task001 目录是在 BOS 根目录下创建的(根目录:登录 BOS 存储服务器后首先看到的目录即为根目录,一般是 Bucket name 目录)。 3)task001、task002... 代表一次车辆标定任务文件夹,即每次标定任务提交时,会训练一个 task文件夹 内的车辆数据;task文件夹 上一层(Origin Folder)可以是 BOS 根目录或其他目录。 4)Vehicle1、Vehicle2... 代表标定的车辆文件夹,可以根据实际情况,按照车辆名称+编号的形式命名,如 ch01、ch02 等。一个 task 文件夹下内可以包含多个 Vehicle 车辆文件夹,在一次任务提交中标定多个车辆。 5)Records 文件内导入采集的车辆标定数据,车辆的录制数据在 apollo/data/bag/ 目录下。 >注意:`Records` 文件夹下需要有 2 层子文件夹,第一层为大时间(年-月-日),如上图 `2019-04-19`,第二层文件夹是具体的 record 文件夹(年-月-日-时-分等),如上图 `2019-04-19-12-45-01` 等,提醒大家一定要注意`Records`文件夹下的文件夹结构还要有2层,不然后续会影响标定找不到文件数据,文件夹结构如上图所示;6)Configuration File 即为 vehicle_param.pb.txt(车辆配置文件),该文件在 apollo/modules/common/data/vehicle_param.pb.txt,将改目录下的文件 vehicle_param.pb.txt 拷贝至 BOS 对应的车辆标定文件夹下,如上图 Vehicle2 文件夹内。 7)总结上述文件夹结构。 BOS根目录 -> Task Folder ->Vehicle Folder -> Records + vehicle_param.pb.txt 查看是否在车辆文件夹内添加车辆配置文件(vehicle_param.pb.txt)。查看录制数据包内是否存在标定需要的 channel 数据。 通过 cyber_recorder info xxxxxx.record.xxxxx 检查采集数据内是否存在下面3个channel的数据: /apollo/canbus/chassis /apollo/sensor/gnss/best_pose /apollo/localization/pose下图为正确的数据包示意:
如果发现缺少了上述 channel 的某一项,请排查相关模块。 文档意见反馈如果您在使用文档的过程中,遇到任何问题,请到我们在【开发者社区】建立的 反馈意见收集问答页面,反馈相关的问题。我们会根据反馈意见对文档进行迭代优化。 |

【本文地址】
今日新闻 |
推荐新闻 |