结构:状态空间表达式 |
您所在的位置:网站首页 › becl2空间结构图 › 结构:状态空间表达式 |
结构:状态空间表达式
|
我们通常先针对研究对象抽取出一个合适的数学模型,进而进行分析、综合等探讨。例如,经典控制理论的传递函数,现代控制函数也有自己的模型结构,即状态空间表达式。 一、状态空间表达式的建立1. 几个基本概念定义1) 状态变量 x(t) :足以完全表征系统运动状态的最少个数的一组变量。 完全表征:只要给定状态变量的初值 x(t_0) 以及 t\geq t_0 时刻的输入 u(t) ,就能够完全确定系统在任何时间 t\geq t_0 的动态行为。 关于 x(t) 的两点说明: a. 状态变量是相互独立的 b. 对于一个实际的物理系统,状态变量的个数大于等于系统中独立储能元件的个数 状态向量 x :若一个系统有 n 个状态变量 x_1(t),x_2(t),...,x_n(t) ,把这 n 个状态变量作为分量所构成的向量就称为系统的状态向量。对同一个动态系统,状态变量的个数是唯一确定的,但是状态向量的选取可以有无穷多种。 2)状态空间:以状态向量的每一个分量 x_1(t),x_2(t),...,x_n(t) 为坐标轴所构成的空间,称为状态空间。 系统任一时刻的状态均可表示为状态空间中的一个点 系统状态随时间变化的过程,在状态空间中描绘出一条轨迹,称为状态轨迹 3)状态方程:由系统状态变量构成的描述系统动态过程的一阶微分方程组,称为系统的状态方程。 状态方程的一般形式为: \dot{x}=Ax+Bu 状态方程用于描述系统输入引起系统状态变化的动态过程 4)输出方程:在指定系统输出y 的情况下,输出向量 y 与状态向量 x 及系统输入向量 u 的函数关系式,称为系统的输出方程。 系统输出方程的一般形式为: y=Cx+Du 系统的状态和输入决定了系统输出的变化 2.状态空间表达式状态方程和输出方程总和起来,构成对一个系统的完整动态描述,称为系统的状态空间表达式。 对于 n 个状态变量、 r 个输入、 m 个输出的动态系统,状态空间表达式的一般形式为: \dot{x}=Ax+Bu y=Cx+Du A\in R (n\times n) ,表征了系统内部状态的联系,称为系统矩阵; B\in R (n\times r) ,表征了输入对状态的作用,称为输入矩阵,也称为控制矩阵; C\in R (m\times n) ,表征了输出与状态变量的关系,称为输出矩阵; D\in R (m\times r) ,表征了输出与输入的关系,称为直接传输矩阵。 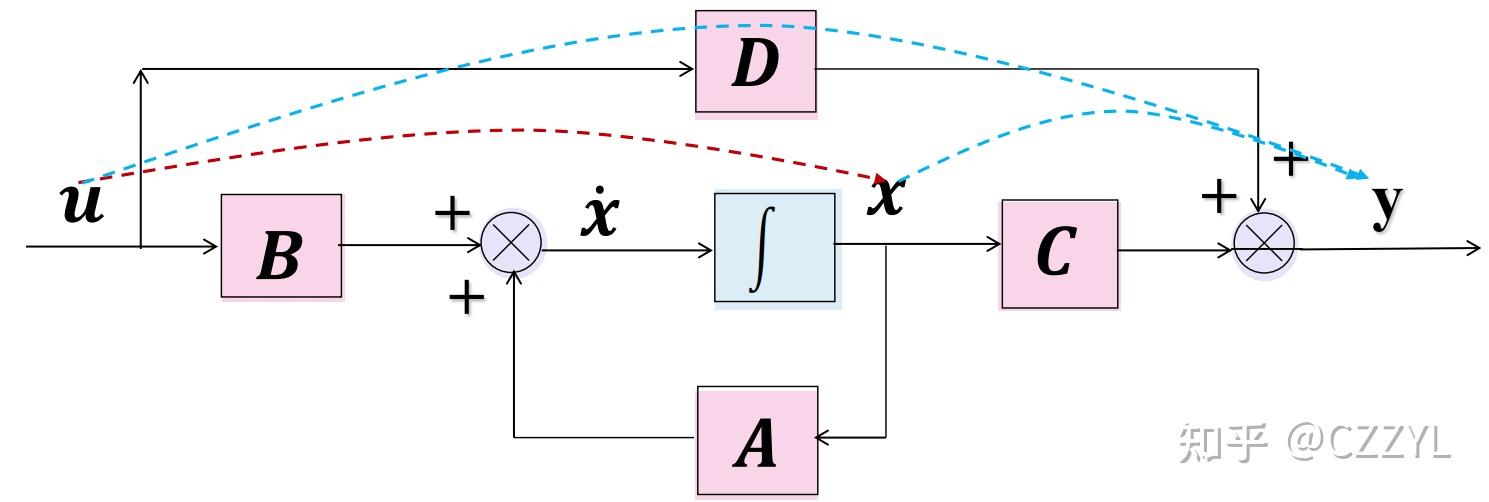 系统方框图 系统方框图显然,状态空间表达式的方框图,只含有比例、积分、加法三类基本环节。 3.状态空间表达式建立方法主要有三种:方框图、机理法、传函转化或高阶微分方程实现 1)由方框图列写 例:根据系统模拟结构图,建立其状态空间表达式  系统模拟结构图 系统模拟结构图步骤:a.传递函数变换 b.选取状态变量 c.列写状态方程 a.传递函数变换  传函变换 传函变换b.选取状态变量 每个积分器的输出选做一个状态变量,共6个状态变量: x1,x2,...,x6 c.列写状态方程  状态空间表达式: 状态方程:  状态方程 状态方程输出方程:  输出方程 输出方程2)从系统的基本原理进行推导(机理法从略) 3)根据传递函数或高阶微分方程实现 实现方法:能控标准型实现、能观标准型实现、特征值规范型实现(对角规范型实现、约当规范型实现) 实现存在的条件: m\leq n 两个特性:a.实现具备非唯一性 b.没有零极点对消的传递函数的实现称为最小实现 例: 已知系统的传递函数为: g(s)=(s+3)/(s^2+3s+2) 写出上式的能控规范型、能观规范型、特征值规范型的状态空间表达式。 a)中间变量法: 由题可得: Y(s)=(s+3)/(s^2+3s+2)U(s) 设 \hat Y(s)=1/(s^2+3s+2)U(s) 则有: Y(s)=(s+3)\hat Y(s) , (s^2+3s+2)\hat Y(s)=U(s) 对上两式取拉氏反变换可得: y= \dot {\hat{y} }+ \hat{y}, \dot {\dot {\hat{y} }}+3\dot {\hat{y} }+ 2\hat{y} =u 取状态变量: [x_1 , x_2]^T=[\hat{y} , \dot {\hat{y} } ]^T 则有:  写成矩阵的形式:  b)待定系数法: 取状态变量:  由  解得  系统的状态空间表达式为:  c)特征值规范型法: 系统的特征多项式为: \lambda^2+3\lambda+2=0 解得: \lambda_1=-1,\lambda_2=-2 由系统的传递函数可得: Y(s)=(s+3)/[(s+1)(s+2)]U(s)=2/(s+1)U(s)-1/(s+2)U(s) 取状态变量的拉氏变换为: X_1(s)=1/(s+1)U(s) X_2(s)=1/(s+2)U(s) 取拉氏反变换可得: \dot x_1=-x_1 +u \dot x_2=-2x_2 +u y=2x_1 -x_2 则有系统的状态空间表达式为:  二、状态向量的线性变换1.非奇异线性变换 二、状态向量的线性变换1.非奇异线性变换状态空间表达式如下: \dot{x}=Ax+Bu y=Cx+Du 令, z=T^{-1}x (线性变换) 则有: \dot{z}=T^{-1}ATz+T^{-1}Bu y=CTz+Du x(0)=x_0,z(0)=T^{-1}x(0) 注: a. 同一系统不同状态向量之间必然存在一种线性变换的关系 b. 非奇异线性变换不改变系统的特征值 2.状态空间表达式的对角规范型和约当规范型1)对角规范型  对系统 \dot{x}=Ax+Bu 进行线性变换: z=T^{-1}x ,必可化为对角规范型。 其中,变换阵为特征向量组成 T=[p_1,p_2,...p_n] 2)约当规范型(系统存在重根) 代数重数:设 \lambda_i 为系统矩阵A的特征值,若 \lambda_i 的重根数为 \sigma_i ,则称 \lambda_i 的代数重数为 \sigma_i 几何重数:设V为n维线性空间, \lambda_i 为系统矩阵A的特征值,则 \lambda_i 的特征子空间 V_{\lambda_i}=p_i\in V|Ap_i+\lambda_ip_i 的维数 \alpha_i , 称为 \lambda_i 特征值的几何重数。 此外,有 \alpha_i=n-rank(\lambda_iI-A) 对给定系统 \dot{x}=Ax+Bu 进行线性变换 z=T^{-1}x ,化为约当规范型的矩阵 T 如何求解 步骤: a.求解特征根 |\lambda_iI-A|=0 b.求几何重数 \sigma_i c.求每一特征值对应特征向量 \lambda_2p_2-Ap_2=-p_1 d.求系数矩阵 \hat A=T^{-1}AT,\hat B=T^{-1}B 三、从状态空间表达式求传递函数矩阵\dot{x}=Ax+Bu y=Cx+Du 得传递函数: Y(s)=(C(sI-A)^{-1}B+D)U(s) 四、离散时间系统、 时变系统和非线性系统的状态空间表达式1.离散时间系统x(k+1)=Gx(k)+Hu(k) y(k)=Cx(k)+Du(k) 2.线性时变系统\dot{x}=A(t)x+B(t)u y=C(t)x+D(t)u 3.非线性系统1)非线性时变系统 \dot{x}=f(x,u,t) y=g(x,u,t) 式中,f,g为函数向量; 2)非线性定常系统 \dot{x}=f(x,u) y=g(x,u) |
【本文地址】
今日新闻 |
推荐新闻 |