一文说尽11种AGV导航方式 拿走不谢 |
您所在的位置:网站首页 › agv种类大全 › 一文说尽11种AGV导航方式 拿走不谢 |
一文说尽11种AGV导航方式 拿走不谢
|
可以说AGV技术发展就是导航导引方式的演进史。导航方式从最初的有轨导航到无轨导航,对特定标志物的依赖逐渐较少,对环境适应性逐渐增强。 11种不同种类的AGV导航方式对比 导航导引技术是AGV技术的核心之一,能让AGV“知道”在哪里。常见的AGV导航导引方式有很多,目前已经得到成熟应用AGV导航有电磁导引、磁带导引、磁钉导引、二维码导引、色带导引、激光导航、视觉导航、GPS导航、混合导航等。面对这么多的导航导引方式,很多消费者便会疑惑,在决定使用AGV时,究竟该选择何种导航方式。 下面是各种导航导引方式的具体介绍和应用场景,为消费者选择合适的导航导引方式提供借鉴意义。 1、电磁导引
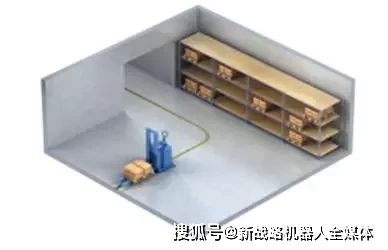
电磁导引(图1)是比较传统的导引方式,实现形式是在自动导引车的行驶路径上埋设金属线,并在金属线上加载低频、低压电流,产生磁场,通过车载电磁传感器通过对导引磁场强弱的识别和跟踪实现导航,通过读取预先埋设的RFID卡来完整指定任务。 电磁导引的主要优点为金属线埋在地下,隐蔽性强,不易受到破环,导引原理简单可靠,对声光无干扰,制造成本低。缺点是金属线的铺设麻烦,且更改和拓展路径困难,电磁感应容易受到金属等铁磁物质的影响。 电磁导引在路线较为简单,需要24小时连续作业的生产制造(如汽车制造)有比较广泛的应用。 2、磁带导引
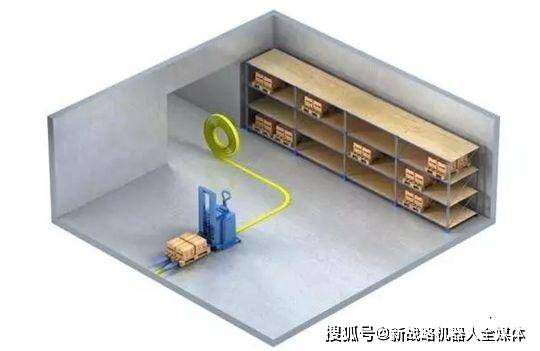
磁带导引(图2)与电磁导引原理较为相近,也是在自动导引车的形式路径上铺设磁带,通过车载电磁传感器对磁场信号的识别来实现导引方式。 磁带导引主要的优点为技术成熟可靠,成本较低,磁带的铺设较为容易,拓展与更改路径相对电磁导引较为容易,运行线路明显,对于声光无干扰。缺点为路径裸露,容易受到机械损伤和污染,需要人员定期维护,容易受到金属等铁磁物质的影响,AGV一旦执行任务只能沿着固定磁带运动,无法更改任务。 磁条导引适用于地面嵌入型、轻载牵引的状态方式,可用于非金属地面、非消磁的室内环境,能够稳定持久作业。
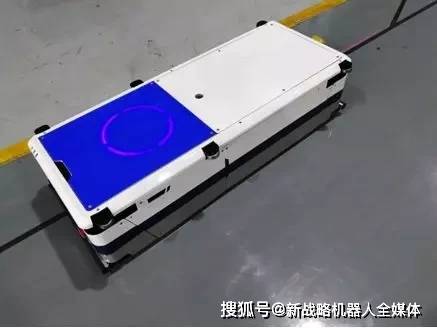
图3 怡丰机器人设计制造的磁条导航潜伏式AGV 3、磁钉导引
磁钉导航(图4)和磁条导航一样都需要磁条传感器来定位AGV相对于路径的左右偏差,磁钉导航与磁条导航的差异就是磁条是连续铺设的,磁钉额离散铺设的。如果需要在完全使用磁钉导航,则需要铺设大量磁钉。磁钉导引的优点是成本低,技术成熟;隐蔽性好,较磁带导航美观;抗干扰性强,耐磨损,抗酸碱。磁钉导引的缺点是AGV路径易受铁磁物质影响,更改路径施工量大,磁钉的施工会对地面产生一定影响,磁钉导引在码头AGV上应用较多。 磁钉导引在怡丰机器人的产品中以辅助导航的形式出现,为了提高AGV的定位精度。怡丰机器人设计制造的停车AGV为激光导航与磁钉导引复合导航,在AGV行驶路劲上使用激光导航,在精度要求较高的停车位上安装磁钉进行精确定位。 4、二维码导引 二维码导引(图5),坐标的标志通过地面上的二维码实现。二维码导引与磁钉导引较为相似,只是坐标标志物不同。二维码导航的原理是自动导引小车通过摄像头扫描地面QR二维码,通过解析二维码信息获取当前的位置信息。二维码导航通常与惯性导航相结合,实现精准定位。 二维码导航目前在市场上十分火热,主要原因是亚马逊高价收购了KIVA二维码导航机器人,其类似棋盘的工作模式令人印象深刻,国内的电商,智能仓库纷纷采用二维码导航机器人。图8是怡丰机器人研发制造的二维码导航AGV,应用智能仓库领域,能够安全稳定实现搬运操作。二维码导引的移动机器人的单机成本较低,但是在项目现场需要铺设大量二维码,且二维码易磨损,维护成本较高。 5、色带导引
色带导引是在自动导引车的形式路径上设置光学标志(粘贴色带或涂漆),通过车载的光学传感器采集图像信号识别来实现导引的方法。光学导引与磁带导引较为类似,主要的优点是路面铺设较为容易,拓展与更改路径相对磁带导引容易,成本低。缺点是色带较为容易受到污染和破环,对环境的要求高,导引的可靠性受制于地面条件,停止定位精度较低。 色带导引适合在工作环境洁净,地面平整性好,AGV定位精度要求不高的场合。 6、激光导航
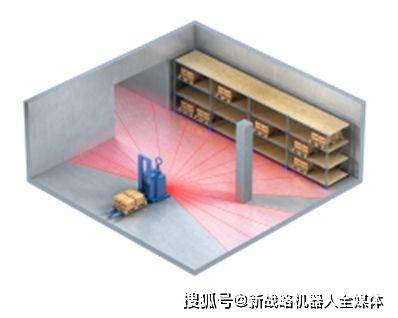
激光导航(图8)一般就指基于反射板定位的激光导航,具体原理是在AGV 行驶路径的周围安装位置精确的反射板,激光扫描器会安装在 AGV 车体上。激光扫描器随 AGV 的行走, 发出激光束,发出的激光束被沿 AGV 行驶路径铺设的多组反射板直接反射回来,触发控制器记录旋转激光头遇到反射板时的角度。控制器根据这些角度值与实际的这组反光板的位置相匹配,计算出 AGV 的绝对坐标,基于这个原理就可以实现非常精确的激光导引。 激光导航的方式使得AGV能够灵活规划路径,定位准确,行驶路径灵活多变,施工较为方方便,能够适应各种实用环境。由于激光导航的反光板处于较高的物理位置,不易受到破环。正常工作时不能遮蔽反光板,否则会影响其定位情况。激光导航由于成本较高,在目前AGV市场上占用率不是很高,但由于其优越性,将会逐渐取代一些传统的导航导引方式。 激光导航是AGV较为先进的导航方式,激光导航应用在怡丰机器人的各个产品线上。
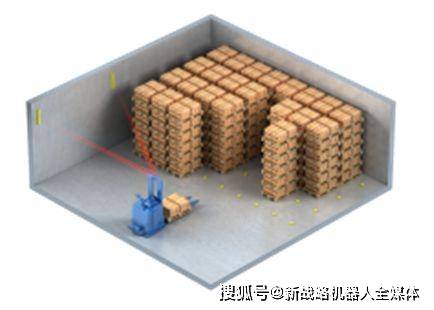
图9 怡丰机器人三代激光导航停车系列AGV 7、自然导航 这里是说的自然导航(图12),也是激光导航的一种,也是通过激光传感器感知周围环境,不同的是激光导航(反射板)的定位标志为反射板或反光柱,而自然导航可以定位标志物可以为工作环境中的墙面等信息,不需要依赖反射板。相比于传统的激光导航,自然导航的施工成本与周期都较低。
图12是怡丰机器人设计制造的自然导航潜伏式AGV,与一般的激光导航同样能够行驶复杂的路径。不同的是自然导航可以依靠墙壁等轮廓信息进行定位,能够有效较少对反光板的依赖,降低施工成本。自然导航的缺点是对环境轮廓依赖比较大,当行驶路径上的轮廓信息出现较大变化时就会出现精度降低的现象。
图12:怡丰机器人自然导航潜伏式AGV 8、视觉导航 通过自动导引车车载视觉传感器获取运行区域周的图像信息来实现导航的方法。图13视觉导航“小精灵”是怡丰机器人研发的以地面纹理为特征信息的视觉导航AGV。硬件上需要下视摄像头,补光灯和遮光罩等来支持该种导航方式的实现,可利用丰富的地面纹理信息,并基于相位相关法计算两图间的位移和旋转,再通过积分来获取当前位置。 该方式通过移动机器人在移动过程中摄像头拍摄地面纹理进行自动建图,再将在运行过程中获取的地面纹理信息,与自建地图中的纹理图像进行配准对比,以此估计移动机器人当前位姿,实现移动机器人的定位。
图13 视觉导航“小精灵” 视觉导航AGV目前在市场上的应用较少,视觉纹理导航的优点是硬件成本较低,定位精确。缺点是运行的地面需要有纹理信息,当运行场地面积较大,绘制导航地图的时间相比激光导航长。 9、GPS导航 GPS(Global Positioning System)导航是通过车载GPS传感器获取位置和航向信息来实现导航的方法。GPS导航的导航精度较低,位置误差在10米左右。GPS导航主要应用在汽车、船舶、手机等定位,在精度要求较高的室内AGV定位上使用较少。 10、惯性导航 惯性导航是利用移动机器人内部传感器,获取位姿。主要有利用光电编码器,陀螺仪,或者两者同时使用。移动机器人的车轮上装有光电编码器,移动机器人在运动的过程中,利用编码器的脉冲信号进行粗略的航位推算,确定移动机器人的位姿。利用陀螺仪可以获取移动机器人的三轴角速度和加速度,通过积分运算获取位姿信息,两种航位推算可以进行融合。惯性导航的成本低,短时间定位精度较高,但会随着运动累计误差,直至丢失位置。所以一般情况下,惯性导航会作为其他导航方式的辅助定位。 11、复合导航
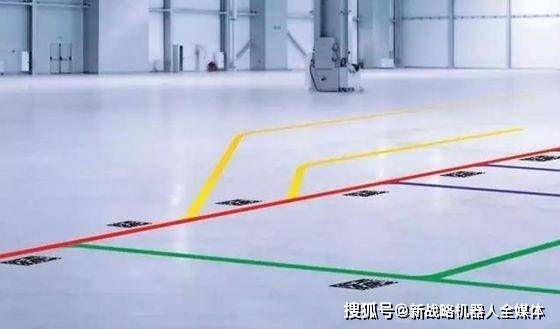
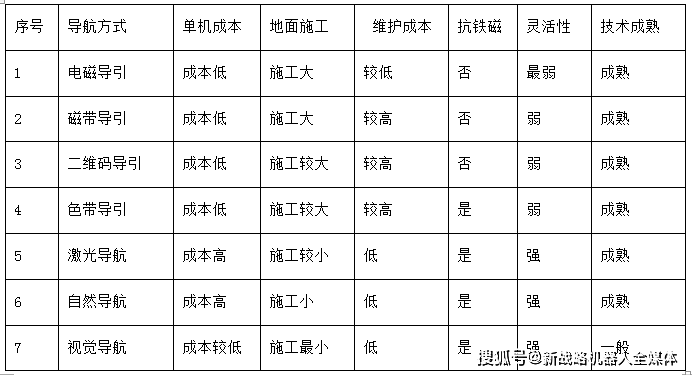
图14 激光磁钉复合导航 复合导航(图14)指应用两种或两种以上导引(或导航)方式实现自动导引车运行的方法。如二维码导航与惯性导航的组合,利用惯性导航短距离定位精度高的特性,将两个二维码之间的导航盲区使用惯性导航。激光导航与磁钉导航组合应用,在定位精度要求较高的站台位置使用磁钉导航,增加AGV定位的稳定性。复合导航是为了使AGV适应各种使用场景常见的导航方式,也将越来越广泛应用在各种AGV上。 总结 怡丰机器人现在能够提供各种导航方式的AGV,可以根据客户需求实现最优的解决方案。AGV各种导航方式的比较见表1。
表1 AGV导航方式比较 总之,AGV作为先进的自动化搬运方案,已经被越来越多的行业和企业使用。AGV的导航方式有很多,发展有先有后,都有各自的缺点和优势,需要根据实际的使用场景因地制宜。返回搜狐,查看更多 |






【本文地址】
今日新闻 |
推荐新闻 |