|
1.介绍
2.新增场景及挑战
2.1 CCFtap (Car-to-Car Front turn-across-path ) 场景
场景描述:  主要面临如下新挑战: 主要面临如下新挑战:
摄像头对于车头、车身侧面的检测能力;摄像头FOV的限制,导致对目标检测中断、不连续;雷达对对向临车道目标的检测能力;自车与对向来车的行驶轨迹预测能力;
2.2 CPNC(Car-to-Pedestrian Nearside Child )
场景描述: 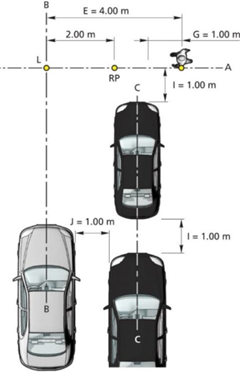 主要面临挑战: 对于近端儿童有遮挡的场景,仅依靠传感器较难检测出目标,无法进行有效的制动;Euro NCAP也考虑通过其他技术来避免此类场景的碰撞,如紧急转向辅助ESS(Emergency Steering Support),这对目标物的检测置信度、横向位置探测的精度(测算偏置率)、车道线的检测置信度都有更高的要求。 主要面临挑战: 对于近端儿童有遮挡的场景,仅依靠传感器较难检测出目标,无法进行有效的制动;Euro NCAP也考虑通过其他技术来避免此类场景的碰撞,如紧急转向辅助ESS(Emergency Steering Support),这对目标物的检测置信度、横向位置探测的精度(测算偏置率)、车道线的检测置信度都有更高的要求。
2.3 CPTA(Car-to-Pedestrian Turning Adult )
场景描述:  主要面临挑战: 当Camera的FOV为52度时,无法通过此场景,在接近行人的过程中,如果发生行人短时间超出camera FOV的情况,需要依赖前雷达\前角雷达的探测能力并结合融合算法进行补偿,才能通过该场景。 主要面临挑战: 当Camera的FOV为52度时,无法通过此场景,在接近行人的过程中,如果发生行人短时间超出camera FOV的情况,需要依赖前雷达\前角雷达的探测能力并结合融合算法进行补偿,才能通过该场景。
2.4 CPRA(Car-to-Pedestrian Reverse Adult )
场景描述:后向AEB功能 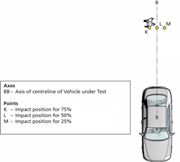  主要面临挑战: 针对后向AEB功能的传感器方案主要有:超声波、环视、后角雷达。 (1)超声波雷达探测距离及定位精度均有限,且无法区分物体类别; (2)环视方案对算法的鲁棒性、检测的准确度要求较高,成熟的产品较少; (3)后角雷达对横向定位精度要求较高,且本车后方会存在0.8-1.0m的探测盲区,存在一定的挑战。 主要面临挑战: 针对后向AEB功能的传感器方案主要有:超声波、环视、后角雷达。 (1)超声波雷达探测距离及定位精度均有限,且无法区分物体类别; (2)环视方案对算法的鲁棒性、检测的准确度要求较高,成熟的产品较少; (3)后角雷达对横向定位精度要求较高,且本车后方会存在0.8-1.0m的探测盲区,存在一定的挑战。
2.5 CBNAO( Car-to-Bicyclist Nearside Adult Obstructed)
场景描述:  目前的方案均较难通过此场景,由于自行车与障碍物纵向距离为4.8m,若前雷达\前角雷达可检测到被遮挡的自行车,则有可能通过此场景; 同时,对于低重叠率的碰撞场景,可考虑紧急转向辅助功能。 目前的方案均较难通过此场景,由于自行车与障碍物纵向距离为4.8m,若前雷达\前角雷达可检测到被遮挡的自行车,则有可能通过此场景; 同时,对于低重叠率的碰撞场景,可考虑紧急转向辅助功能。
总结
结合ENCAP的2025 Road-map的工作计划表,未来将会增加驾驶员监控系统(Driver Monitoring System) 。
对驾驶员的疲劳、分心的检测以及对应的提醒(视觉、听觉,触觉等)。对驾驶员的疾病(sickness)、异常行为(abnormal behavior influenced by drug or alcohol)等的提醒在检测到驾驶员疲劳后,采取主动的干预行为。
|