ADAMS&Simulink 机器人动力学仿真入门(二):ADAMS设置无人机连接、驱动、力与变量(代码已开源) |
您所在的位置:网站首页 › adams旋转驱动怎么反向 › ADAMS&Simulink 机器人动力学仿真入门(二):ADAMS设置无人机连接、驱动、力与变量(代码已开源) |
ADAMS&Simulink 机器人动力学仿真入门(二):ADAMS设置无人机连接、驱动、力与变量(代码已开源)
|
前言
上一章介绍了仿真工作的前置准备,包括Solidworks的画图与导出,ADAMS的导入与操作简介。 本章对无人机在ADAMS中如何进行连接、驱动、力等相关内容的设置进行介绍。
1 设置重力与地面
1.1 设置重力
上文提到重力在进入软件后进行设置,因为在Solidworks中,我们的装配体是x轴为正方向,z轴为垂直方向,所以设置重力方向为z轴反方向。  初始重力方向为y轴负方向,调整为z轴负方向
初始重力方向为y轴负方向,调整为z轴负方向
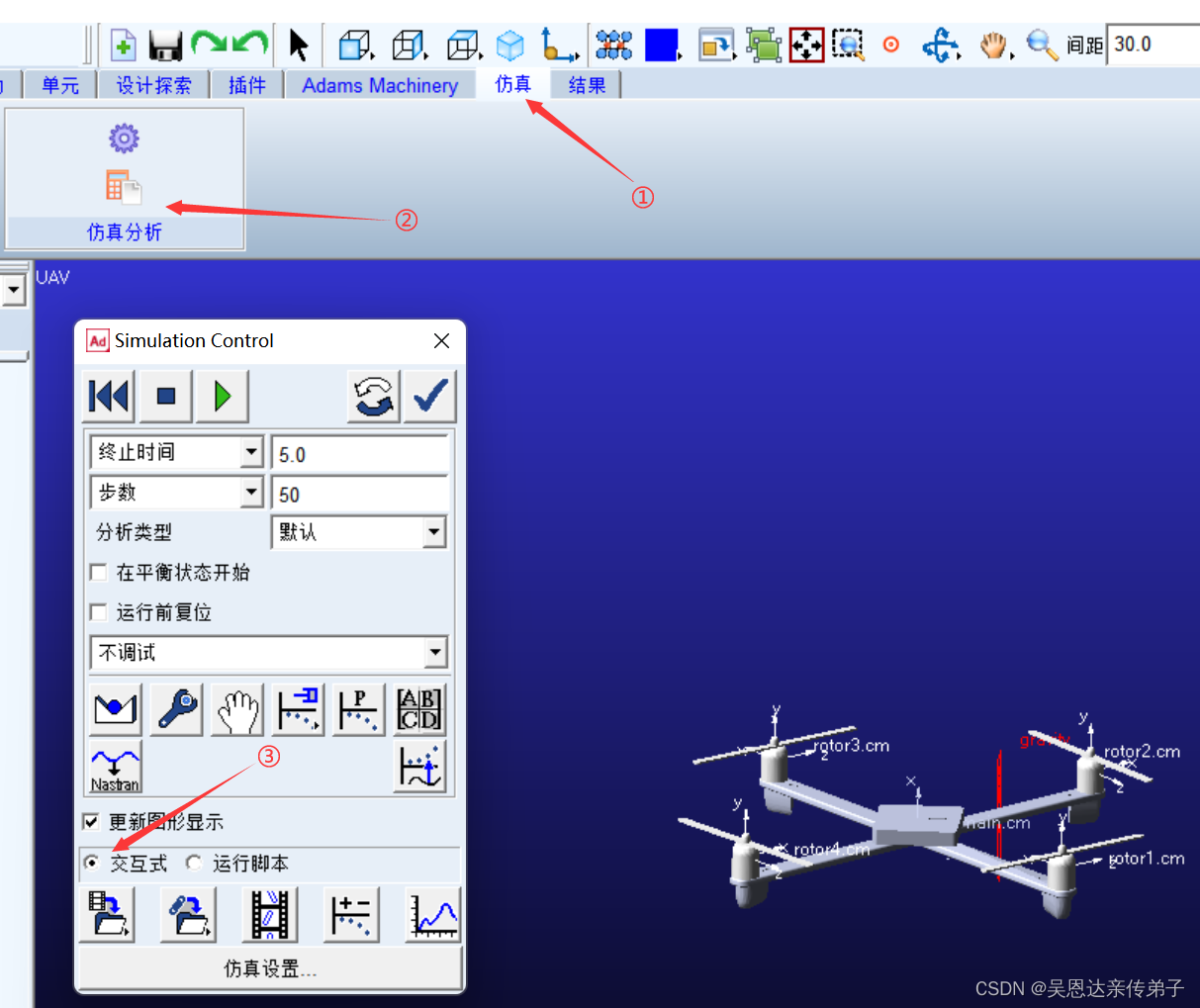
 点绿色按钮仿真一下看看,如果没问题,那飞机应该垂直哐当往下掉
点绿色按钮仿真一下看看,如果没问题,那飞机应该垂直哐当往下掉
 1.2 添加地面
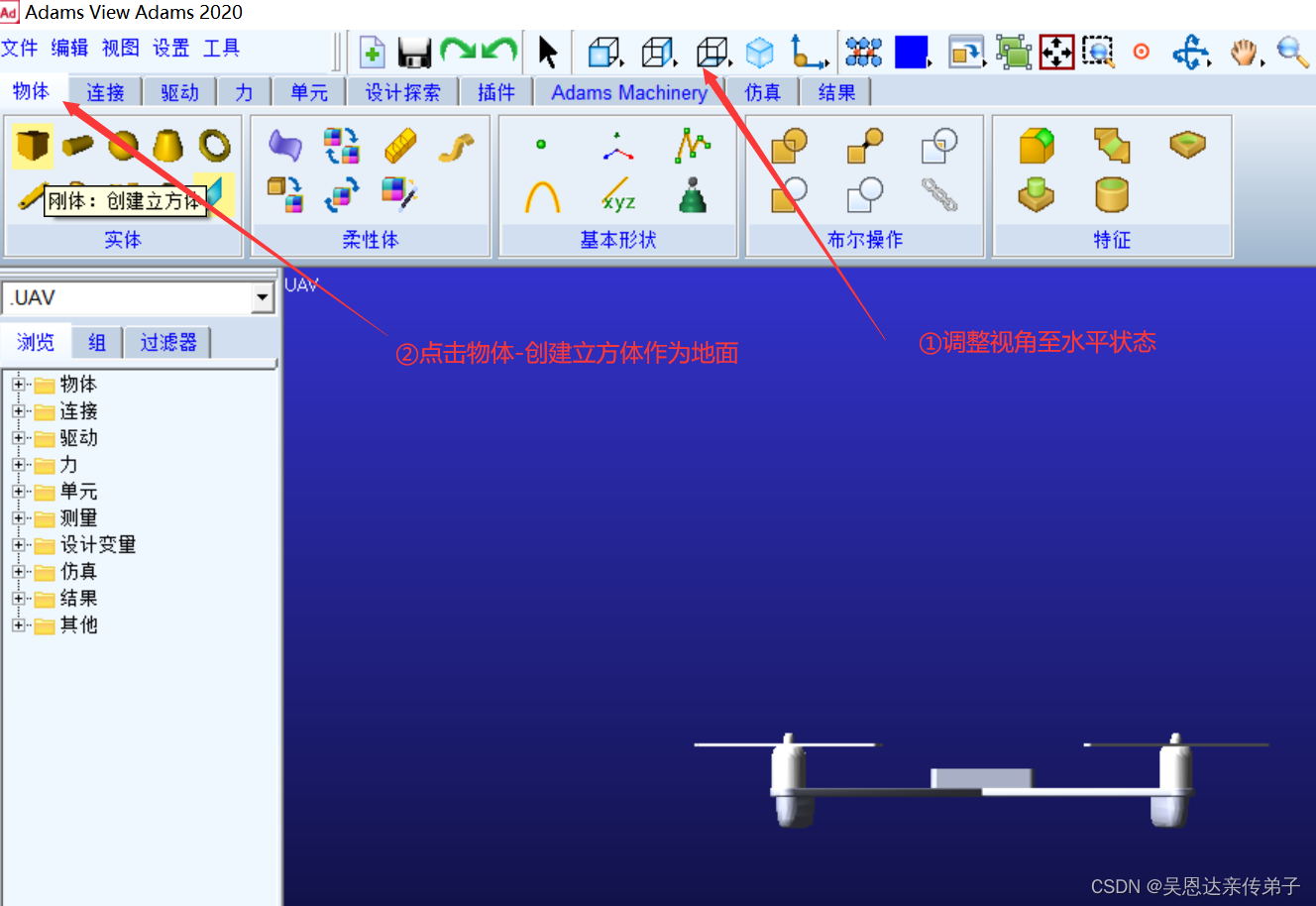
调整无人机视角,并创建立方体作为地面。
1.2 添加地面
调整无人机视角,并创建立方体作为地面。
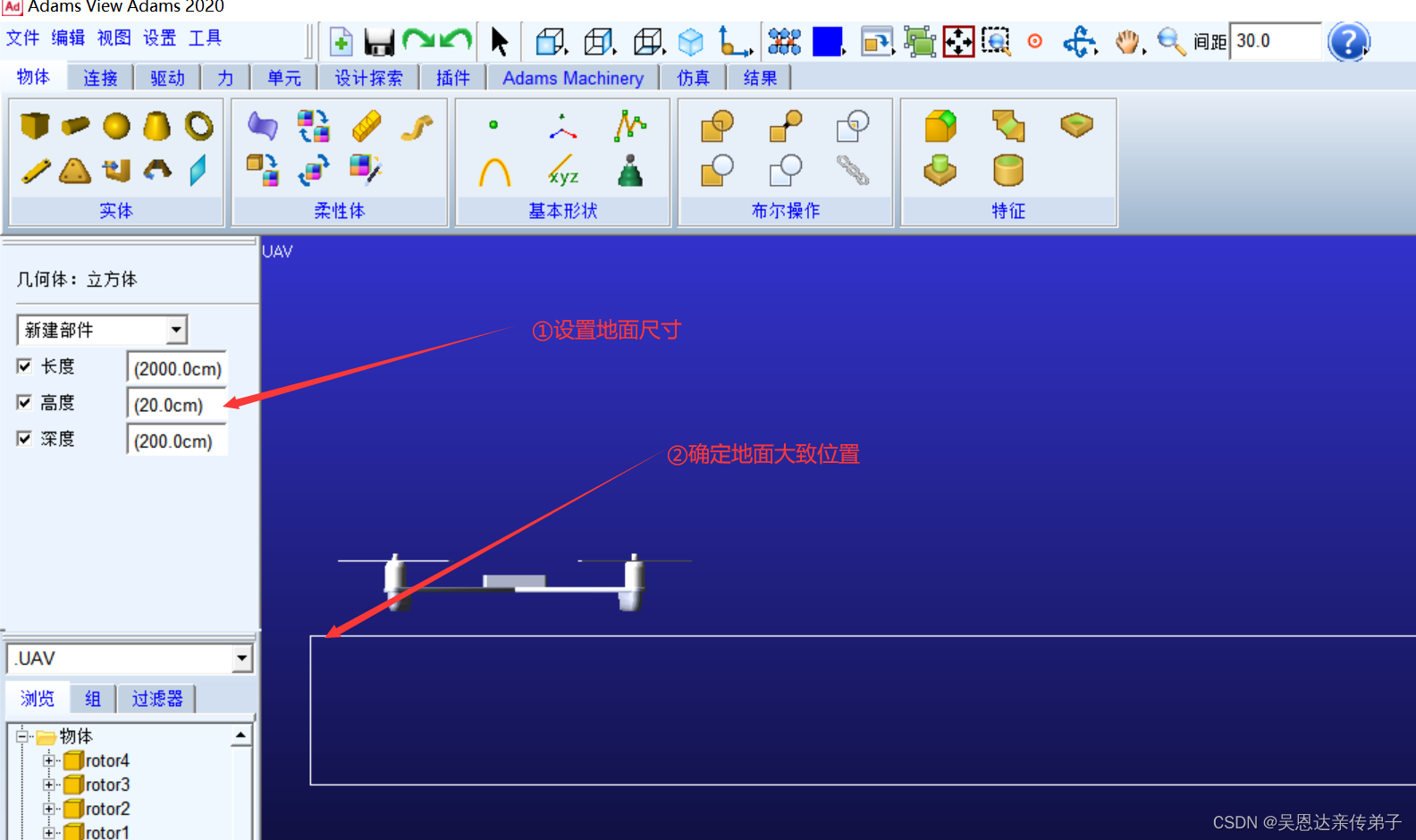
 设置地面尺寸,确定大概位置
设置地面尺寸,确定大概位置
 可以通过以下方法对物体进行移动和旋转
地面不能进行移动,所以可以移动整个无人机,这里仅演示怎么操作,不是要移动地面!!
可以通过以下方法对物体进行移动和旋转
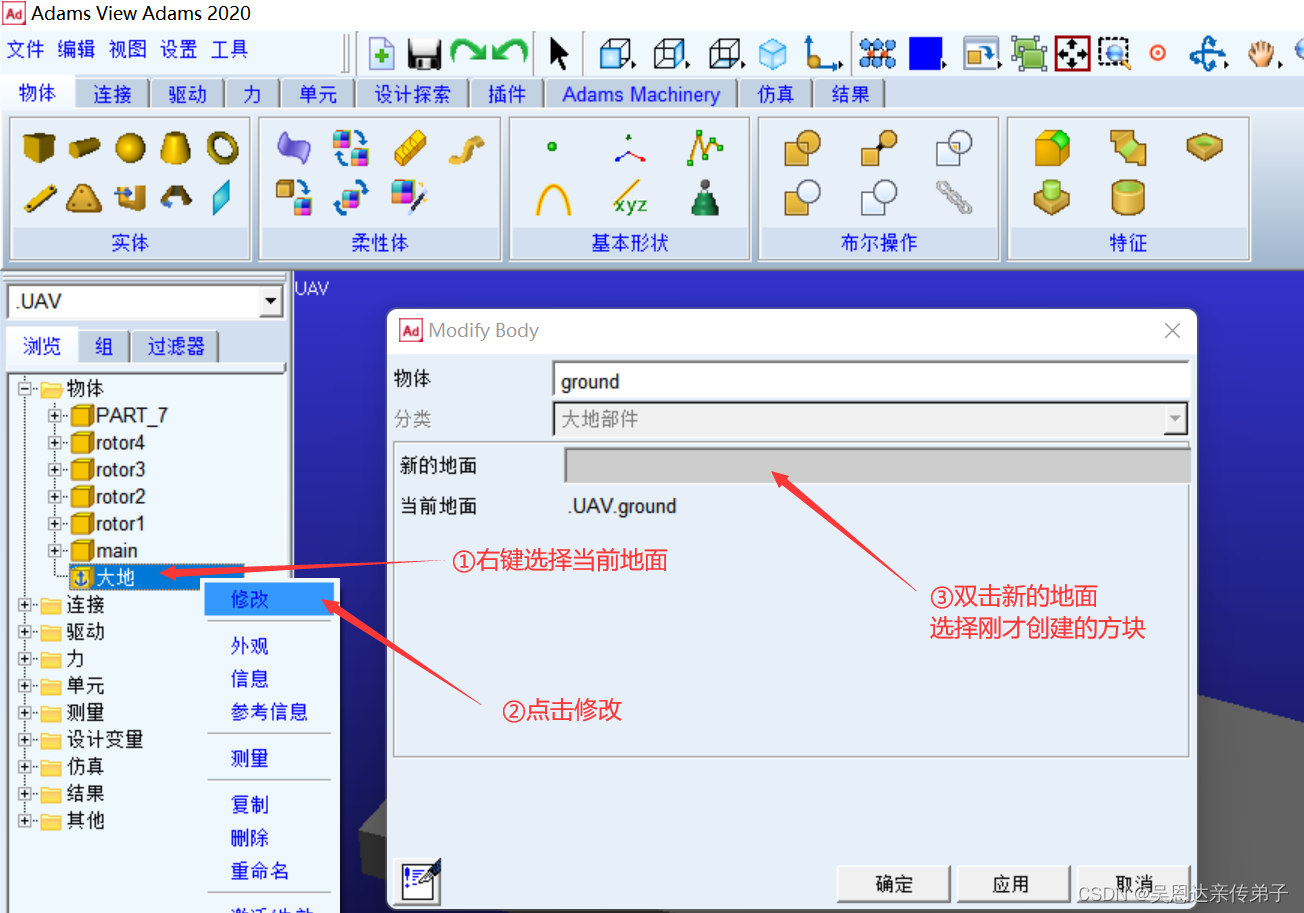
地面不能进行移动,所以可以移动整个无人机,这里仅演示怎么操作,不是要移动地面!!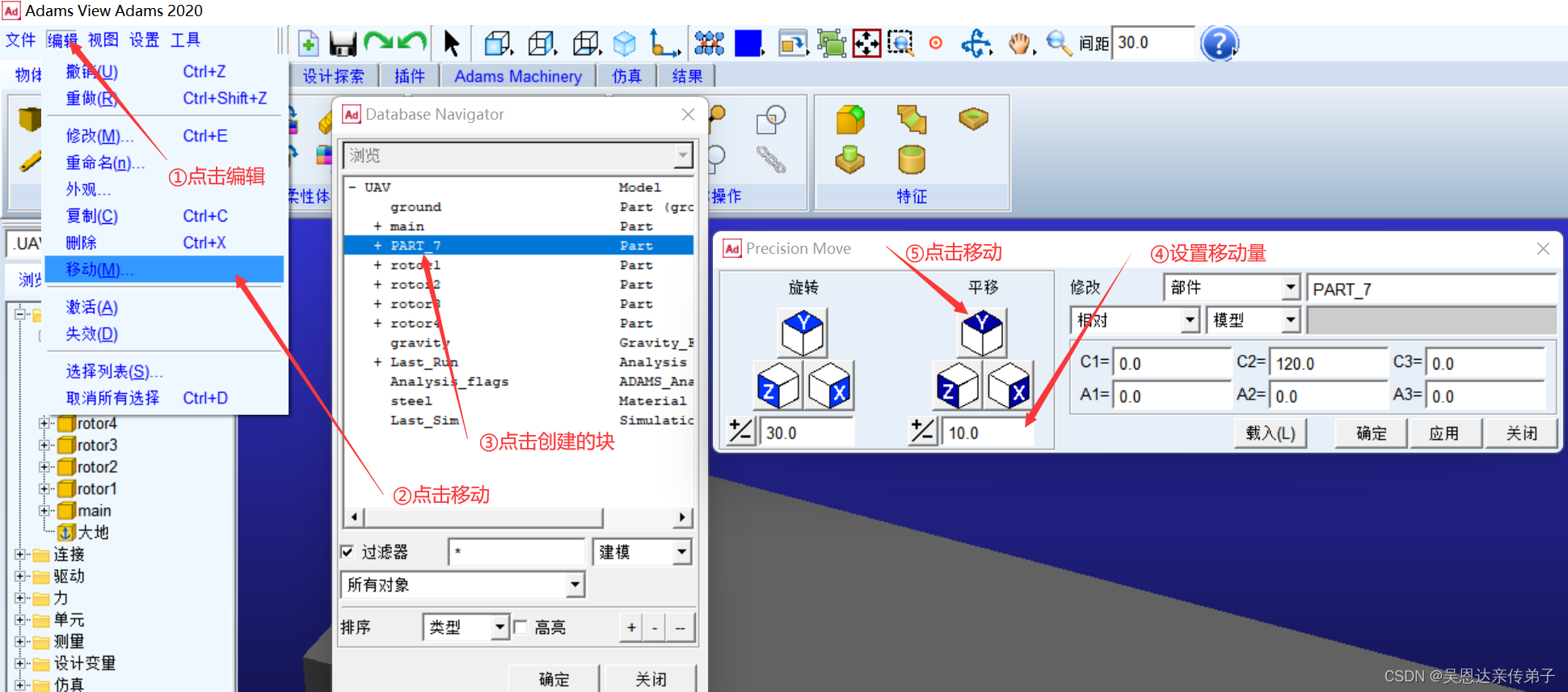 设置方块为地面
设置方块为地面
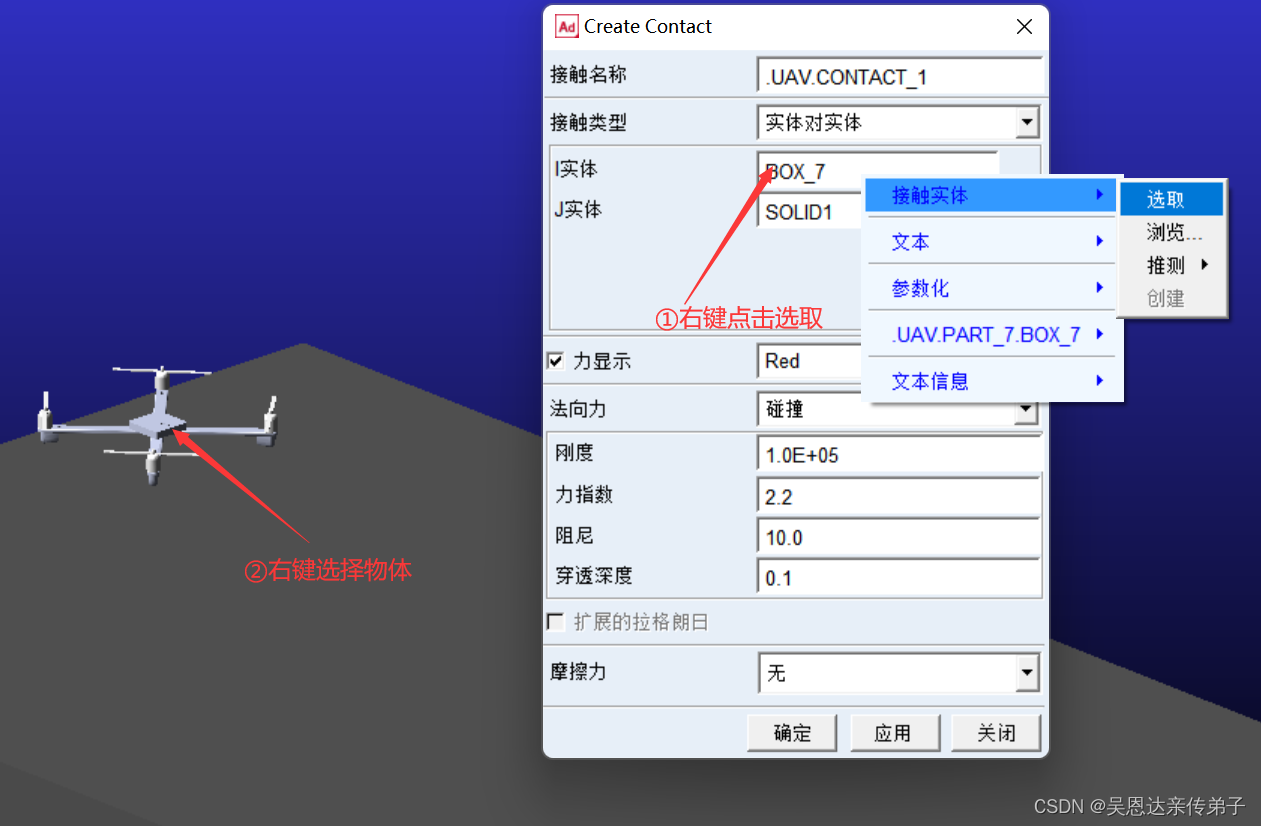
此时,地面已经设置完成!但是重新进行仿真,发现无人机和地面没有碰撞 所以需要对无人机与地面添加接触力  选择需要添加接触的两个物体
选择需要添加接触的两个物体
 2 添加连接、驱动与力矩
2.1 添加连接
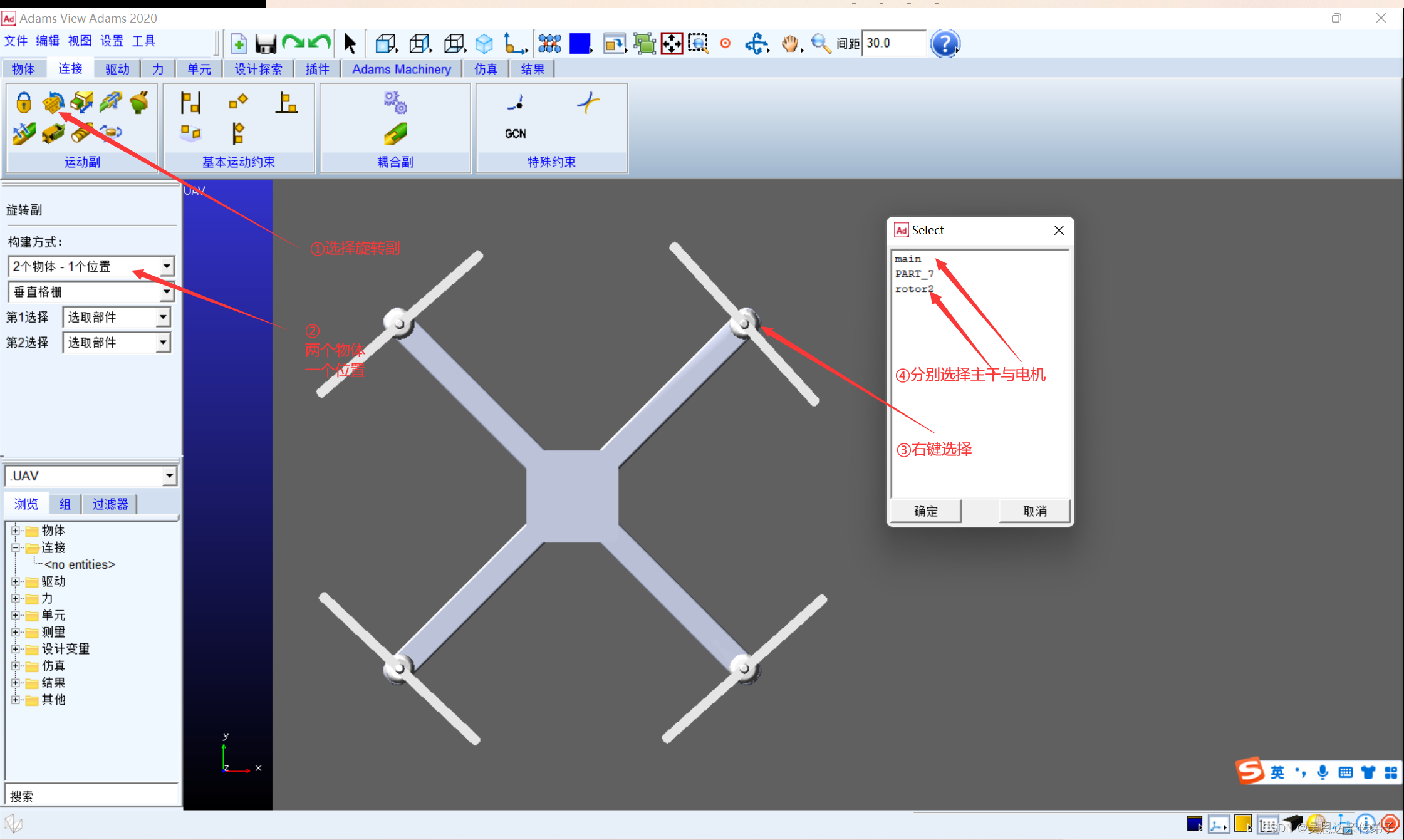
选择连接 - 旋转副添加驱动:
2 添加连接、驱动与力矩
2.1 添加连接
选择连接 - 旋转副添加驱动:
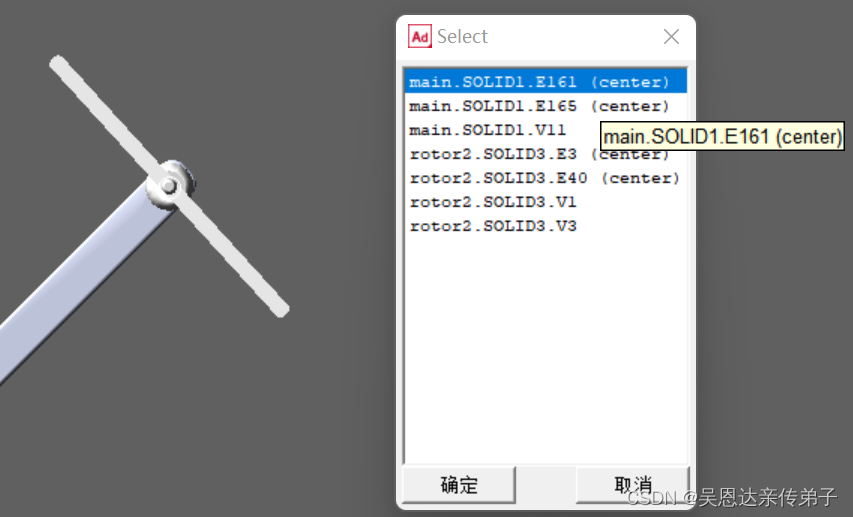
依次添加四个连接 点开这个视图图标可见性,看看选择方向是否正确 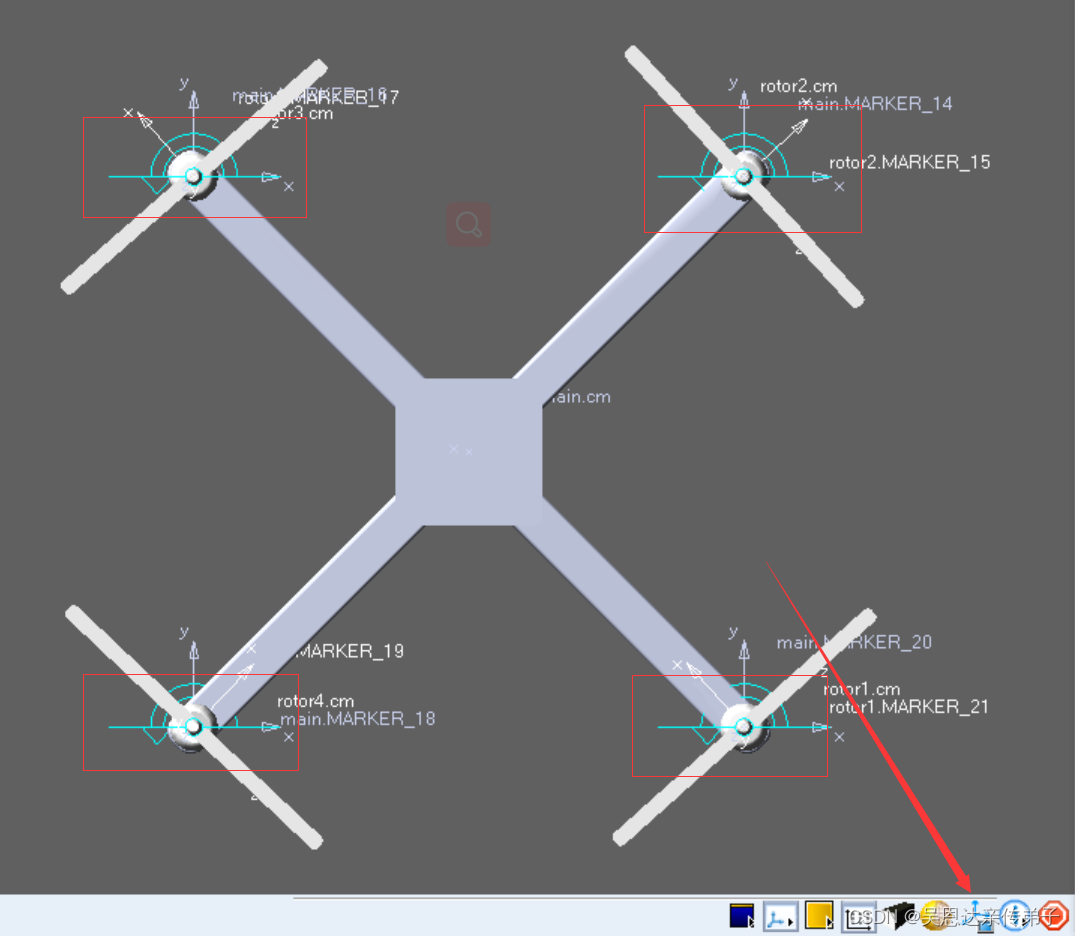 2.2 添加驱动
2.2 添加驱动
驱动与力矩是添加在连接上的 在工具栏中的驱动添加旋转运动副如图,完成后双击将类型选项的位移改为为速度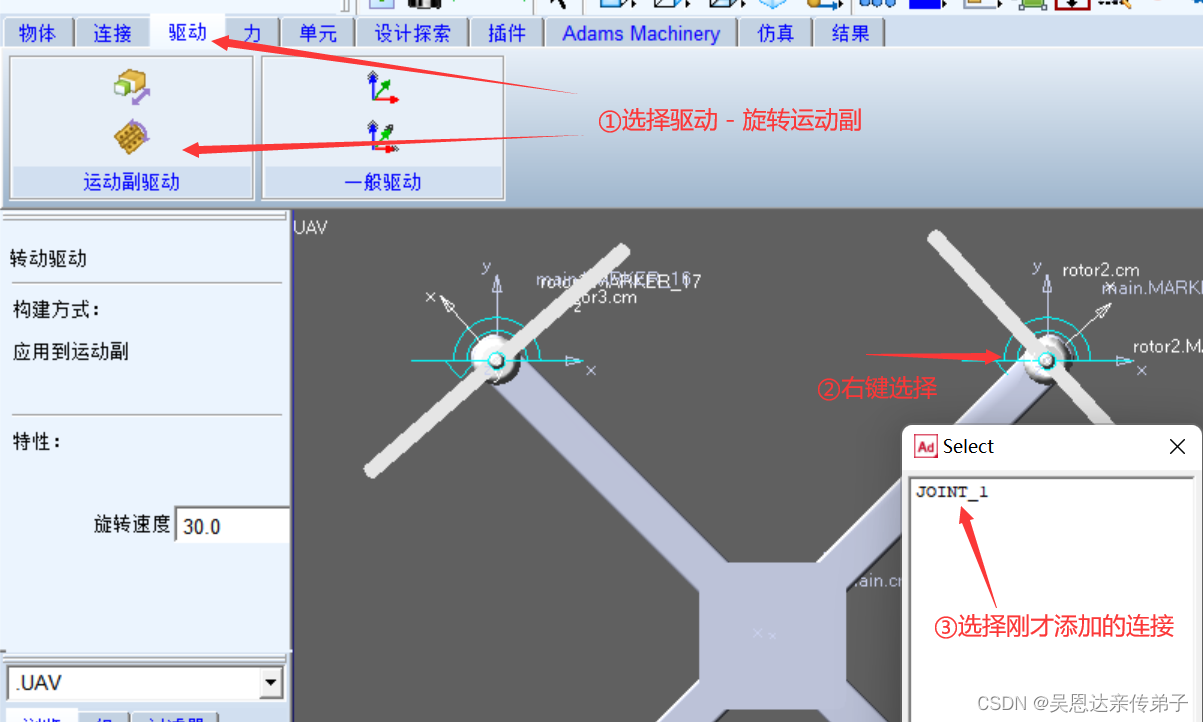 注意,这是驱动的方向为同向转动,而无人机螺旋桨转向如图,所以反向转动需要在驱动的函数前添加负号。
2.3 添加拉力与力矩
添加随物体运动的拉力
注意,这是驱动的方向为同向转动,而无人机螺旋桨转向如图,所以反向转动需要在驱动的函数前添加负号。
2.3 添加拉力与力矩
添加随物体运动的拉力
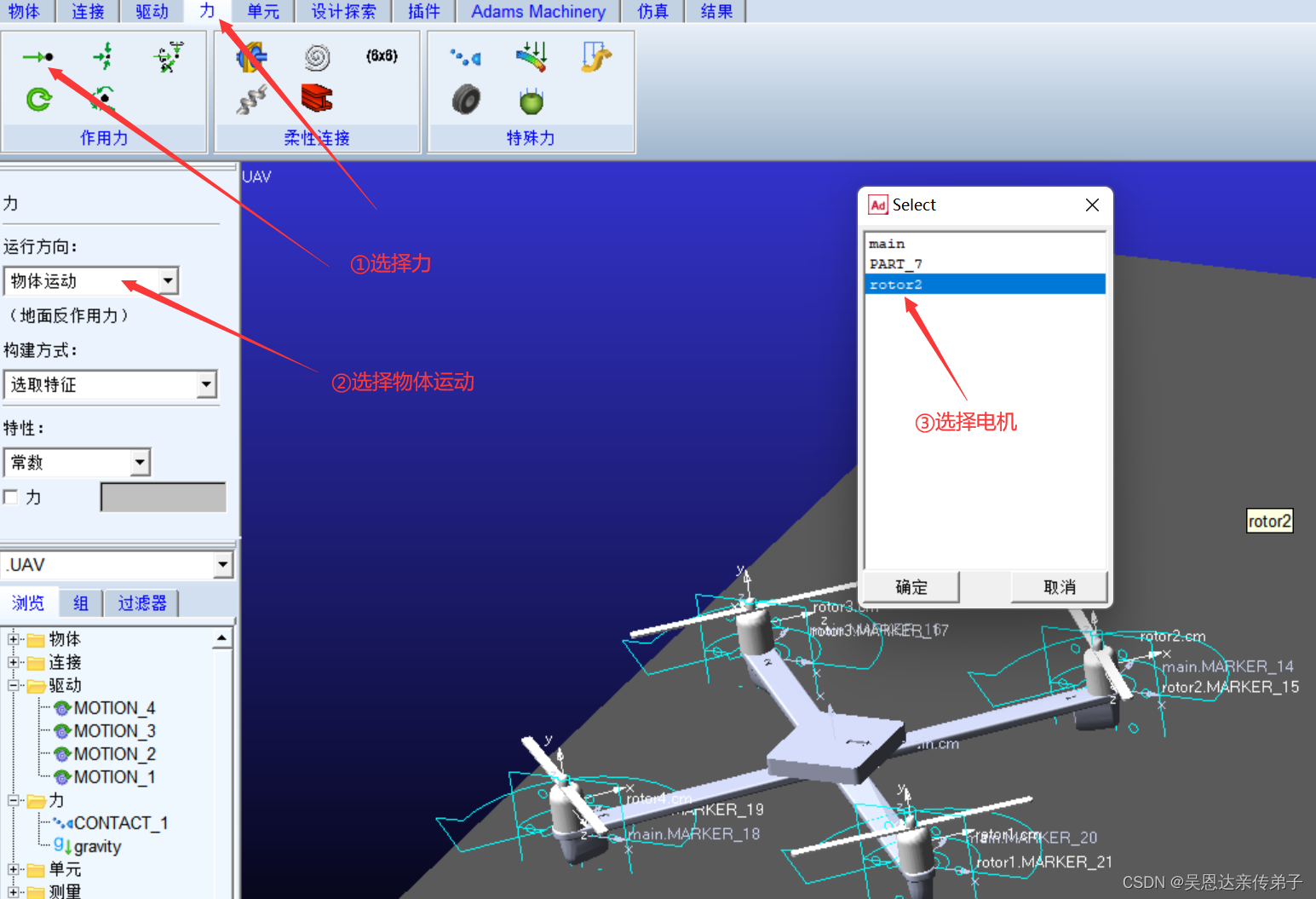 方向同理,设置朝上
方向同理,设置朝上
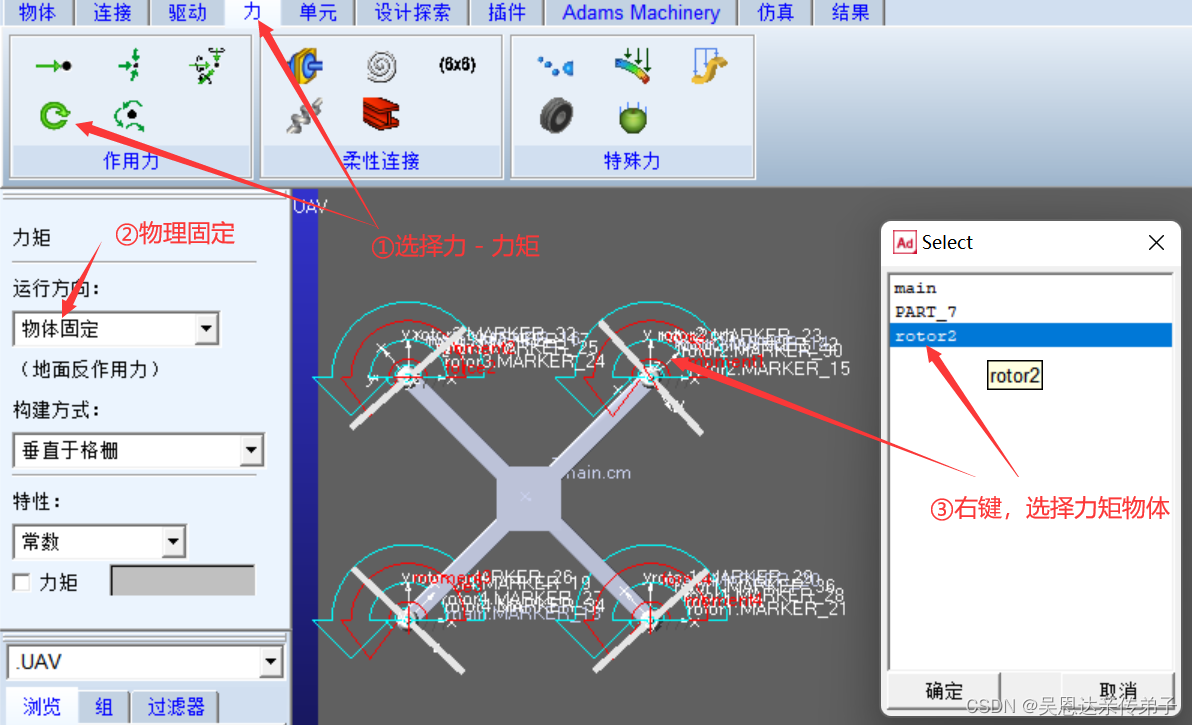 注意,这是转动惯量的方向为同向转动,与驱动方向相同,反向转动需要在对应的函数前添加负号。
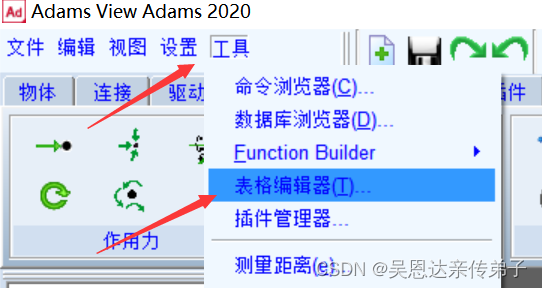
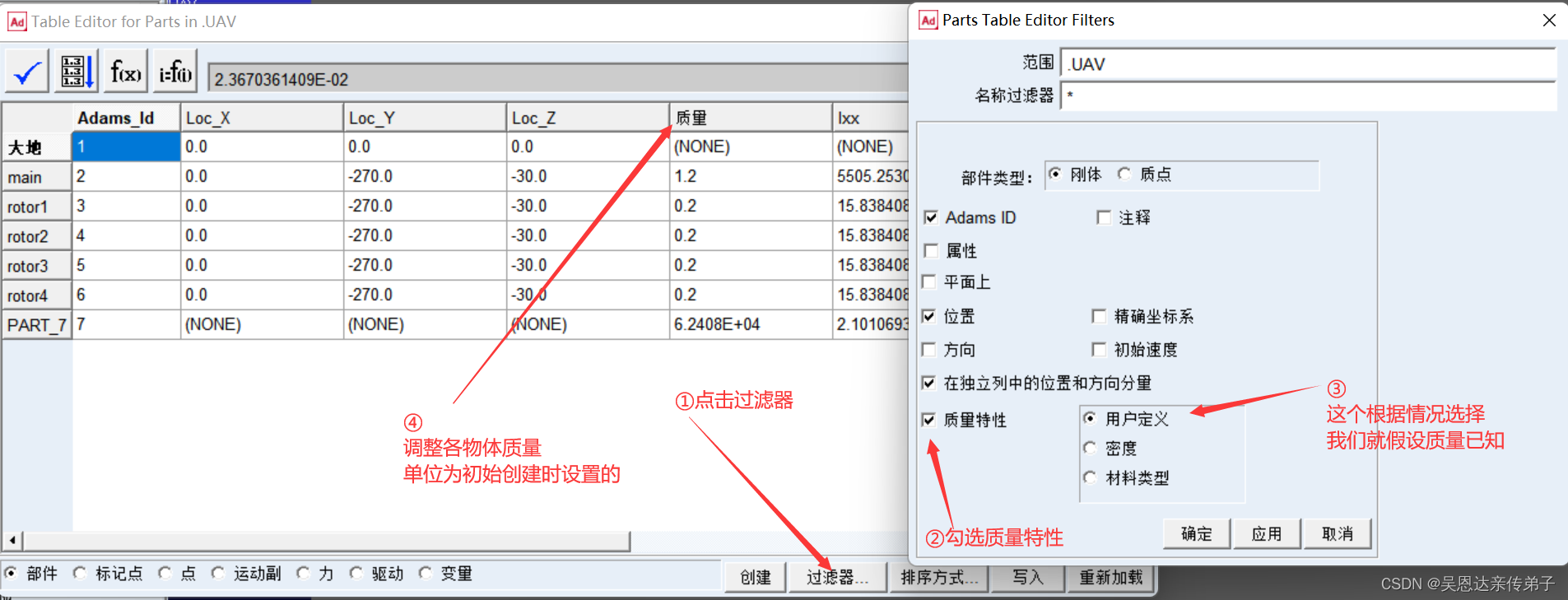
2.4 调整物体质量
可以使用表格编辑器进行快速的模型修改
注意,这是转动惯量的方向为同向转动,与驱动方向相同,反向转动需要在对应的函数前添加负号。
2.4 调整物体质量
可以使用表格编辑器进行快速的模型修改
 - 通过过滤器打开质量特性,选择用户定义并进行修改 - 通过过滤器打开质量特性,选择用户定义并进行修改
 依次设置如图
依次设置如图
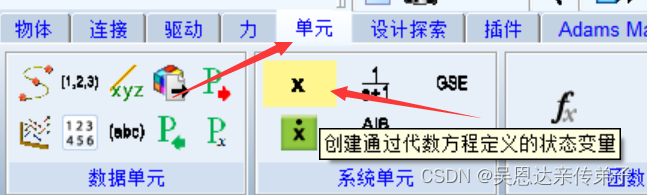
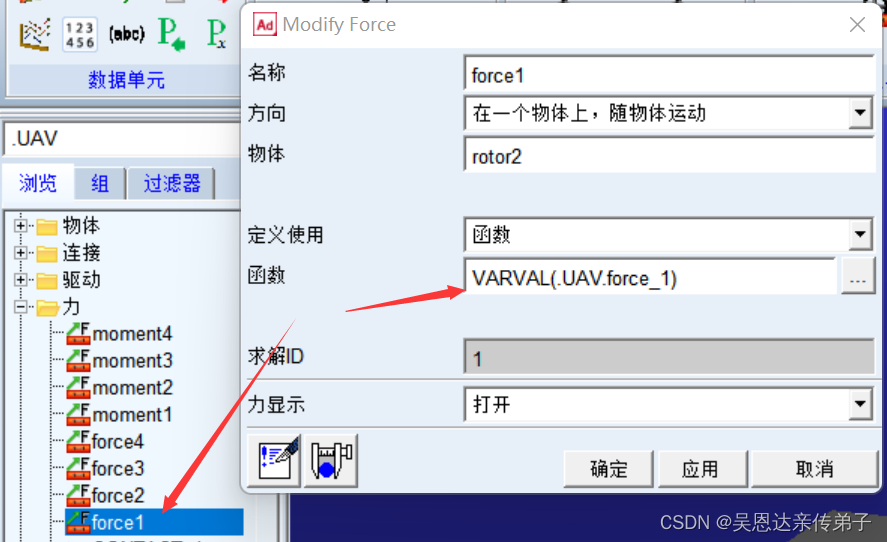
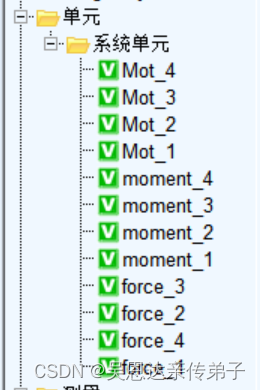 使用函数VARVAL()函数添加至对应驱动与力
使用函数VARVAL()函数添加至对应驱动与力
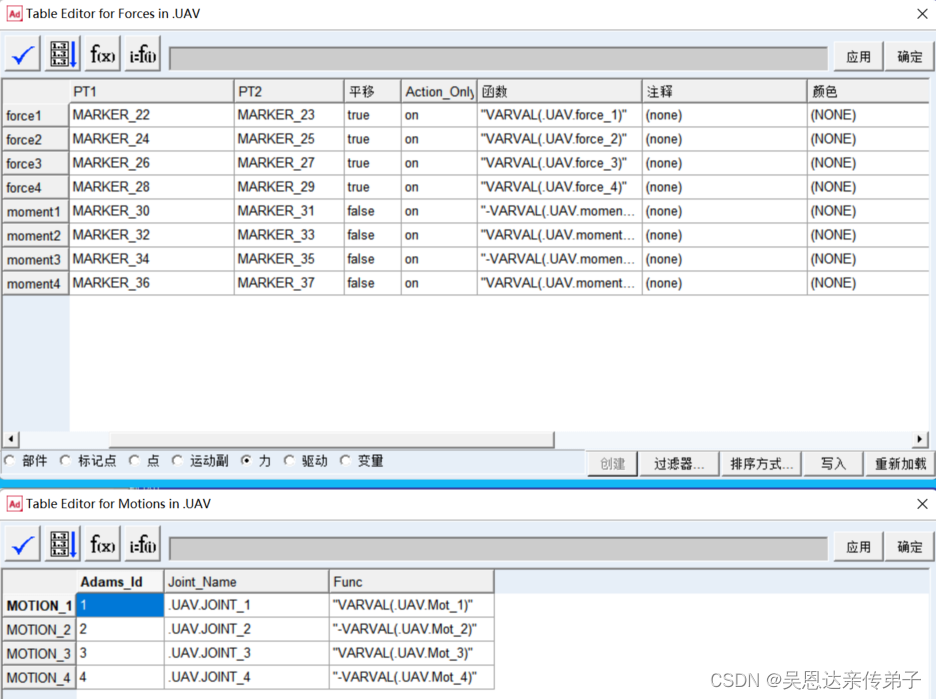
 通过表格编辑器查看,最后设置如图
通过表格编辑器查看,最后设置如图
 # 总结 本文介绍了如何在ADAMS中对模型进行设置,包括连接、驱动、力、质量与单元,比较繁琐,可能会遇到很多奇怪的小bug,可以留言,尽量帮助大家解答。 # 总结 本文介绍了如何在ADAMS中对模型进行设置,包括连接、驱动、力、质量与单元,比较繁琐,可能会遇到很多奇怪的小bug,可以留言,尽量帮助大家解答。
下一章讲讲怎么导出模型并在Simulink进行连接与通信。 |
【本文地址】