机器人关节VSA和SEA驱动器 |
您所在的位置:网站首页 › acservo是什么牌子的驱动器 › 机器人关节VSA和SEA驱动器 |
机器人关节VSA和SEA驱动器
|
知乎限制了Title的最高字数,确切的题目在这里: VSA为什么不适合搭建人形机器人或机械臂&结合控制原理和结构实现对SEA特征和功能原理的联合理解&如果你非让我说出SEA(带物理柔性驱动器)一个不可替代的优势。 VSA为什么不适合搭建人形机器人或机械臂?首先简单介绍一下VSA: VSA=Variable Stiffness Actuator,中文名为“变刚度驱动器”,是通过【特定的机械结构+二级电机(或手动)】实现机械物理层面刚度变化的驱动器。 学术界研究开发VSA的初衷也很简单,人体的运动关节就是一个变刚度的系统。大脑、小脑及运动中枢能够根据要实现的不同运动去主动调节关节刚度的大小——直观的例子如下:你和别人友好握手时整个手臂的刚度与你愤怒挥拳打人时手臂的刚度就是完全不一样的。 因此,很多研究人员首先就从机械层面上去研究和设计能够主动改变关节刚度的机器人关节驱动器,希望能够使得机器人的运动性能最大程度去和人类看齐。 VSA在单驱动器层面上面临的问题主要有:如何在保持高性能的情况下降低尺寸和重量。这里的高性能主要体现在: 高扭矩输出能力(High Torque Capacity); 宽范围的刚度变化区域(Wide Range of Stiffness);快速刚度变化能力(Rapid Stiffness Regulation Ability);关于以上问题的一个良好的解决方案,我的导师(Nikos G. Tsagarakis)远在2011年就有一个相关的工作: A New Variable Stiffness Actuator (CompAct-VSA): Design and Modelling (2011 IROS, September 25-30, 2011. San Francisco, CA, USA) 总结来说,在较小的尺寸和重量下,实现了如下性能的变刚度驱动器(CompAct-VSA): 较高峰值扭矩(127Nm);理论上【零-无限大】的可变刚度范围;快速刚度变化响应;相关实现和基本原理如下图: 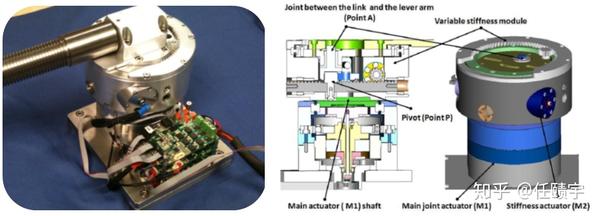
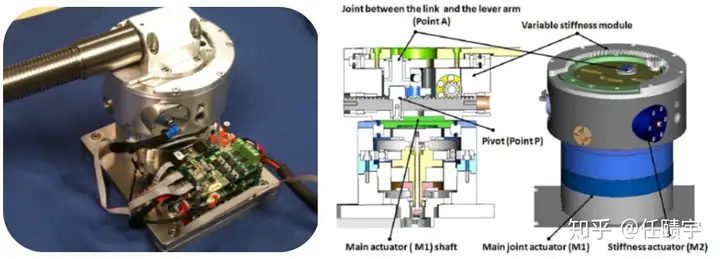 CompAct-VSA
CompAct-VSA
包括同年相关主题的ICRA的文章: AwAS-II: A New Actuator with Adjustable Stiffness based on the Novel Principle of Adaptable Pivot point and Variable Lever ratio (2011 ICRA, May 9-13, 2011, Shanghai, China) 都可以算得上是一个较早且较好的变刚度驱动器(VSA)的实现方案。 --------------------------------------------------------------------- “为什么当时做VSA做的顺风顺水,而现在的全系腿足式机器人都没有采用VSA方案呢?”——这也是最近在和同行交流的时候被问到最多的一个问题。 为此,我也抽时间去问了我的导师,其实得到的答案也很简单,汇总如下: 实现变刚度有更容易实现的控制层面的替代方案;包含二级电机的VSA系统集成过于复杂(考虑双足人形30+以上的关节驱动器数目);双足人形的输出扭矩(峰值250Nm左右)要求下,VSA还是过大过重,紧凑性不足;总而言之,VSA是一个很适合做科研的方向,首先在于有novel的机械结构设计的文章可写。其次,在这类新颖硬件系统下实现的运动控制,本身在创新点上就没啥毛病,因此很容易出较好的控制算法类的文章。 但现阶段实际的应用场景非常有限——仅可能在单关节下的康复设备上有VSA的一席用武之地,我了解到还在使用VSA搭建机械臂的研究单位不算多,比较有名的有: 德国宇航局(DLR)荷兰特温特大学(Twente University)布鲁塞尔自由大学(Vrije Universiteit Brussel)(等) 结合控制原理和结构实现对SEA特征和功能原理的联合理解(这块的话,需要一定的相关基础知识,否则你可能不太知道我在说什么) 首先SEA的定义为:Series Elastic Actuator,即弹性串联驱动器。一个很重要的点是,这个概念中的“弹性”该如何理解? 我们知道,从机械层面实现力反馈的驱动器单元(排除电流环),其核心都是利用的材料的形变和弹性去测量扭矩或者力。因此即使是传统的高刚度基于应变片测量原理的驱动器,你也可以从微观上把他去理解成有“弹性”,从微观上将其归入SEA的范畴。 因此,对于MIT Cheetah组的Patrick M. Wensing在2017年TRO文章中,提出的如下图三种腿足式机器人的常见驱动器的种类,我们又该如何去更好区分第一种和第二种呢? 
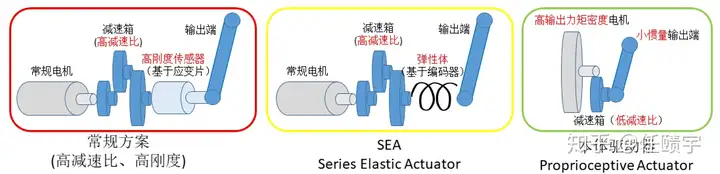 Three different EM actuator concepts (第三类本体驱动器电流环力反馈不做讨论)
首先直观来看,常规方案和SEA的区别是在于所使用测量力矩反馈的传感器类型不用,前者是基于应变片原理(Strain Gauge Based),后者是基于编码器测量偏角原理(Encoder Based, Angle Deflection)。但这类传感器使用的区别只是结果,并不是深层次的原因。其次我们进一步来看,造成使用不同传感器原理的根本原因还在于减速箱和输出端之间材料的刚度大小不同。这也是我之前认知中,一直以来用来区分这两种方案的一个直观标准,我个人摸索的刚度在于10000Nm/rad——高于这个值为常规方案,低于此值为SEA方案。接着我们做如下的思考,我们都知道在高刚度材料的方案中,编码器因为本身分辨率大小的不足,不适合于用在此类因为高刚度而造成材料形变角度偏小的情况中,因此我们都采用应变片方案。那么,如果我们在低刚度或中低刚度材料(小于10000Nm/rad)中使用应变片方案,按照之前既定的数值划分,是否合适归类于SEA方案中呢?——以现在结合和桂凯博士从控制层面讨论的结果:这类中低刚度基于应变片的方案是不能归于SEA的。
Three different EM actuator concepts (第三类本体驱动器电流环力反馈不做讨论)
首先直观来看,常规方案和SEA的区别是在于所使用测量力矩反馈的传感器类型不用,前者是基于应变片原理(Strain Gauge Based),后者是基于编码器测量偏角原理(Encoder Based, Angle Deflection)。但这类传感器使用的区别只是结果,并不是深层次的原因。其次我们进一步来看,造成使用不同传感器原理的根本原因还在于减速箱和输出端之间材料的刚度大小不同。这也是我之前认知中,一直以来用来区分这两种方案的一个直观标准,我个人摸索的刚度在于10000Nm/rad——高于这个值为常规方案,低于此值为SEA方案。接着我们做如下的思考,我们都知道在高刚度材料的方案中,编码器因为本身分辨率大小的不足,不适合于用在此类因为高刚度而造成材料形变角度偏小的情况中,因此我们都采用应变片方案。那么,如果我们在低刚度或中低刚度材料(小于10000Nm/rad)中使用应变片方案,按照之前既定的数值划分,是否合适归类于SEA方案中呢?——以现在结合和桂凯博士从控制层面讨论的结果:这类中低刚度基于应变片的方案是不能归于SEA的。
我之前的认知有些许偏颇,特此如下更正: 如果要根本上做一个良好的对于1.传统方案和2. 弹性串联驱动器(SEA)的区分,必须要把上层力控中的控制带入进来一起理解。 Jerry Pratt在94年SEA的始祖论文中强调过,SEA的力控是将力控制转变为位置控制,因此需要一个能产生较大形变的弹性体和相应的编码器(1个或2个)去得到一个至关重要的偏角 θ\theta 的就是SEA,否则就不是。能直接得到力信息(Force/Torque)的一般是传统方案,测量得到电流值就是本体驱动器方案(也称为直驱电机方案)。 我之前提到的基于10000Nm/rad的材料刚度大小的判断SEA的方案,是因为上层控制要求带来的硬件实现的结果,而非本质的原因。 如果你非让我说出SEA(带物理柔性驱动器)一个不可替代的优势较真而自我批判地说: SEA(带物理柔性驱动器)的缺点: 给上层运动控制带来复杂性,诸如通频带窄,响应慢而不够精确等硬件实现难度复杂,可靠性欠缺,成本高SEA(带物理柔性驱动器)的优点(可替代): 能够较好实现输出扭矩的测量(常规方案和电流环也能做到)储能,提高运动效率(电气层面电容也能做到相同效果)放大峰值输出速度(现阶段技术不需要这点,正常走路还没学会,就想着跑跳了)柔性与人交互,保护人类(上层运动控制也能实现,阻抗和导纳控制等)、SEA(带物理柔性驱动器)的优点(不可替代): 一张GIF图片概括: 
 IIT WALK-MAN Fall Down at 2015 DRC
IIT WALK-MAN Fall Down at 2015 DRC
即掉电之后的抗外界冲击保护——电源和通信一掉,运动控制和保护没办法实现,必须依靠物理层面上的柔性去实现机器人关节驱动器的保护。而这一点也是比较近的未来,机器人脱离实验室的保护进入真实环境中,一个比较现实需要面对的问题。 (GIF图为基于SEA的WALK-MAN在2015DRC中掉电摔倒,但扶起来所有关节驱动器还是能正常使用,体现一个SEA的物理层面抗外界冲击的能力) Acknowledgement: 要鸣谢以下四位小伙伴给予的讨论交流中的思维碰撞的花火: 桂凯博士(上海交通大学)刘章兴博士(哈尔滨工业大学)赵波博士(广东工业大学)谭文博士(北京灵铱科技) |
【本文地址】
今日新闻 |
推荐新闻 |