ABB机器人设置干涉区 |
您所在的位置:网站首页 › abb机器人设置home点 › ABB机器人设置干涉区 |
ABB机器人设置干涉区
|
一、添加ABB机器人干涉区功能选项包
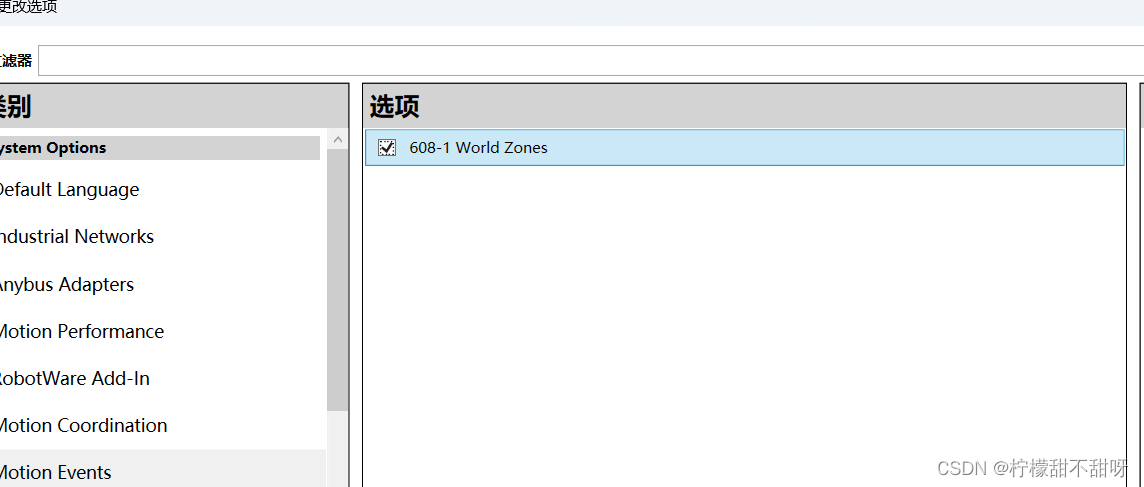
需要使用ABB机器人干涉区的功能,需要机器人配置608-1world zone功能项
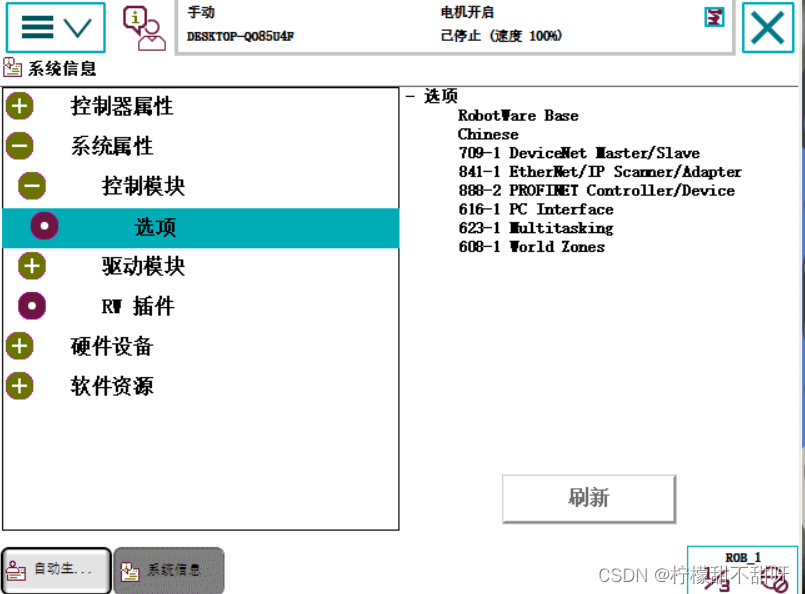
也可在示教器上查看是否安装干涉区的软件功能
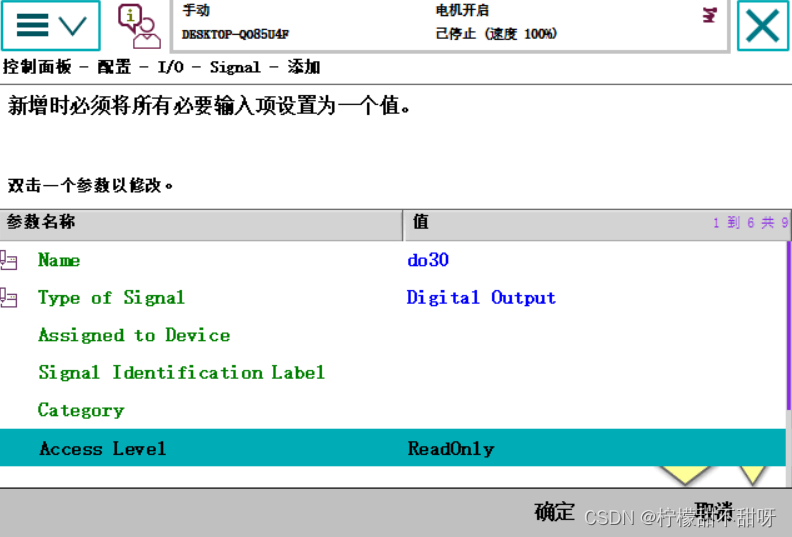
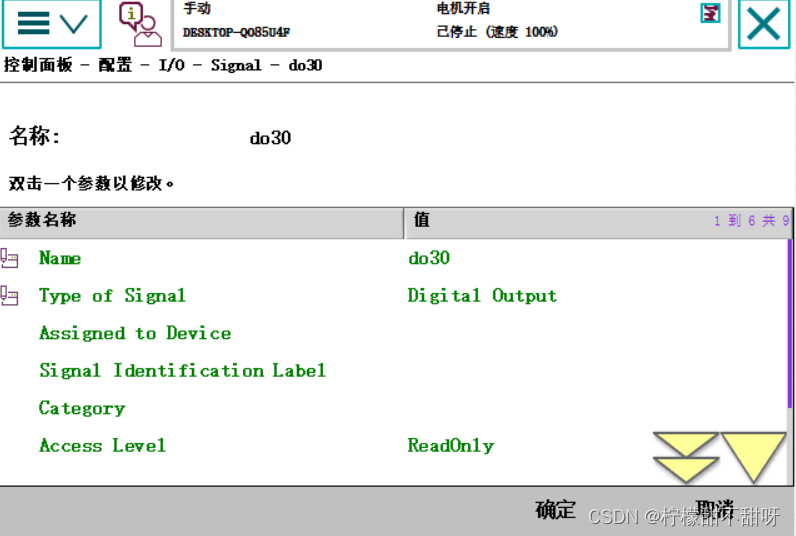
创建输出信号,并将信号定义为不可干预的模式
添加一个创建干涉区的子程序,在子程序中添加干涉区指令
WZBoxDef - 定义一个箱形全局区域 WZCylDef - 定义圆柱形全局区域 WZDisable - 停用临时全局区域监控 WZDOSet - 启用全局区域,设置数字信号输出 WZEnable - 启用临时全局区域监控 WZFree - 擦除临时全局区域监控 WZHomeJointDef - 定义内部接头的全局区域 WZLimJointDef - 定义有关接头内限制的全局区域 WZLimSup - 启用全局区域限制监控 WZSphDef - 定义球形全局区域 本篇案例使用的是创建一个矩形区域的干涉区,需要用到的数据类型有3种shapedata、wzstationary、pos分别用于记录图形变量、全局空间监控变量和位置变量
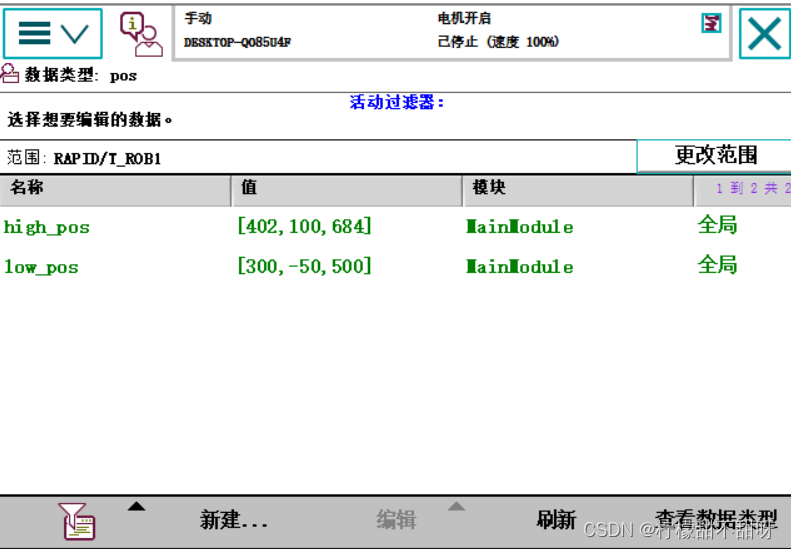
创建一个空间区域变量shapedata用于纪录绘制的图形
创建一个全局空间监控变量wzstationary用来绑定空间区域变量
干涉区的io信号不能受到外部设备的影响和控制,将触发类型选择为readonly只读型
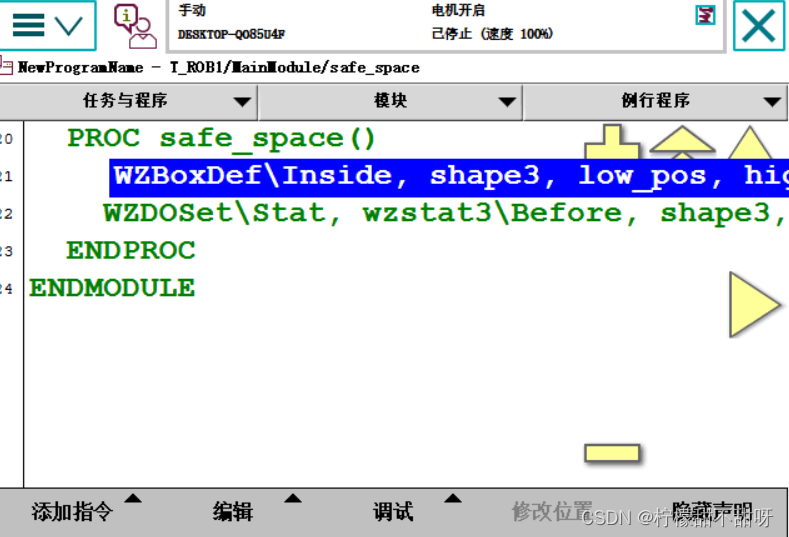
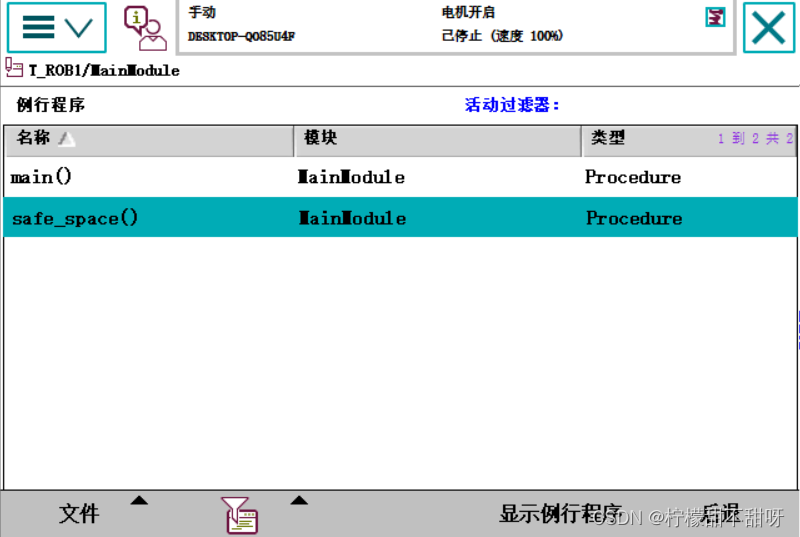
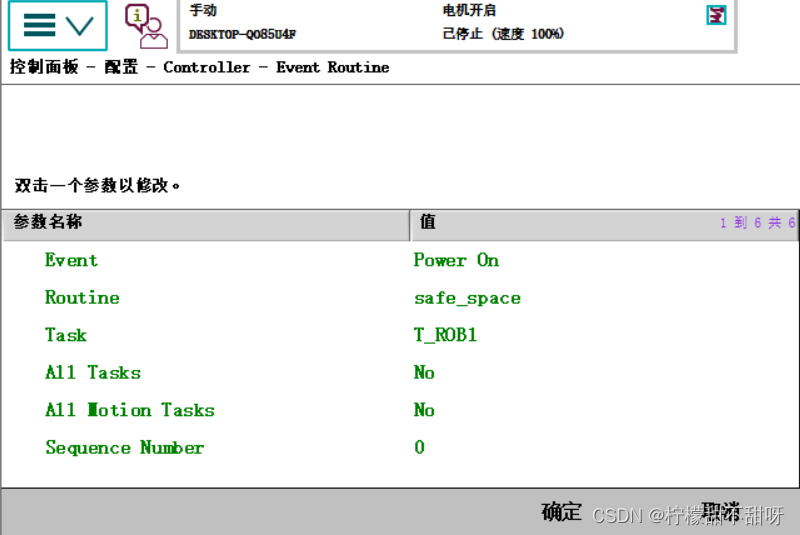
新建一个名称为safe_space的例行程序作为干涉区触发程序
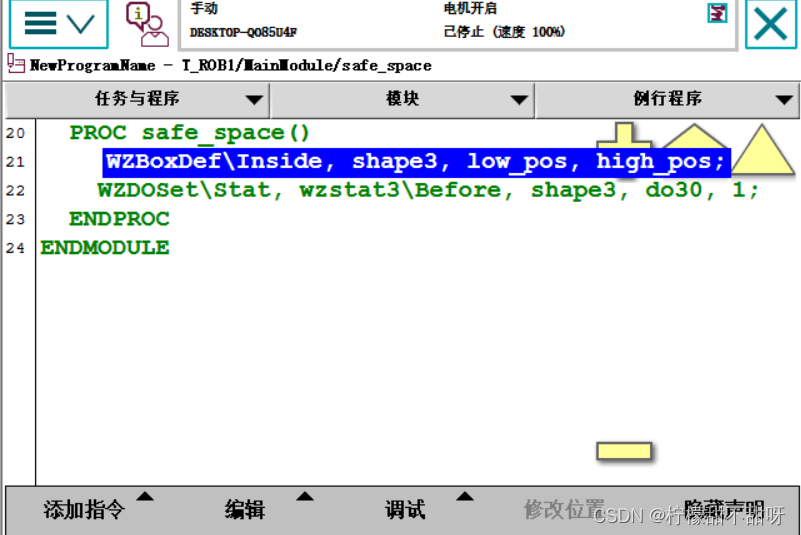
添加对应的指令,先定义一个矩形的对顶角的空间区域,将空间区域的IO设置before为进入空间前触发,也就是没进入区域就是保持1,进入干涉区io置为0
进入程序事件页面将干涉区触发程序设置为上电触发类型
|


【本文地址】
今日新闻 |
推荐新闻 |