ABB机器人碰撞检测灵敏度设置 |
您所在的位置:网站首页 › abb机器人手动全速速度怎么改 › ABB机器人碰撞检测灵敏度设置 |
ABB机器人碰撞检测灵敏度设置
|
机器人的碰撞灵敏度是指机器人对碰撞事件的识别和反应能力。碰撞灵敏度取决于机器人的感知和控制系统以及其硬件结构。控制系统则负责根据感知系统的反馈信息,对机器人进行相应的控制和调整,以减少或避免碰撞。控制系统可以根据碰撞的严重程度来判断机器人在当前位置是否需要停止。 一、添加ABB机器人碰撞监控软件包需要设置ABB机器人控制监控的选项的话需要添加对应的软件控制包613-1Collision Detection,添加改软件包后,即可在示教器监控页面对机器人碰撞灵敏度进行对应的调节。
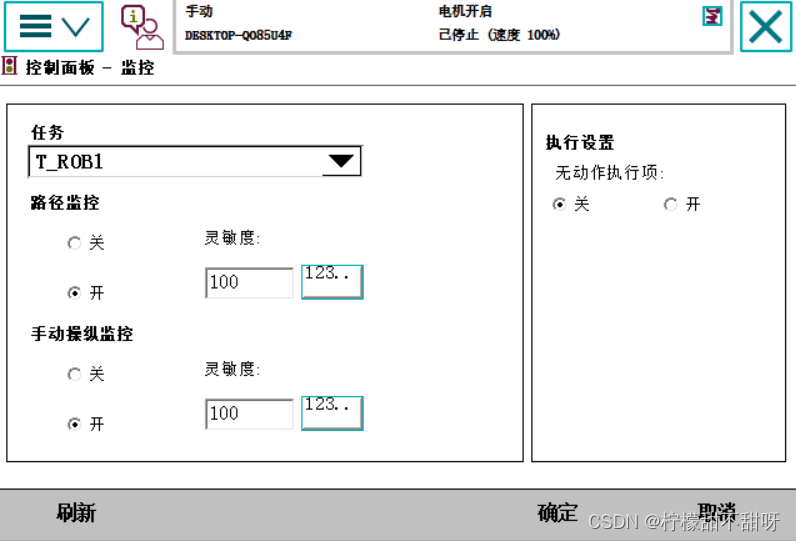
打开ABB机器人控制面板中的监控页面对机器人碰撞灵敏度进行调节
在路径监控和手动操纵监控中将灵敏度进行调节,数值越大,表示灵敏度越低,即碰撞响应越难发生。这种设置允许用户根据实际需求调整碰撞检测的敏感度。例如,一些客户可能会因为严格的安全要求而提高敏感度(如调到75%),而另一些客户则可能会因为载荷的质量或惯量较大,嫌碰撞检测过于敏感而频繁报错,因此选择降低敏感度(如调到200%)。还有一些特殊情况下,如安装超限的载荷,客户可能会选择关闭碰撞检测功能。
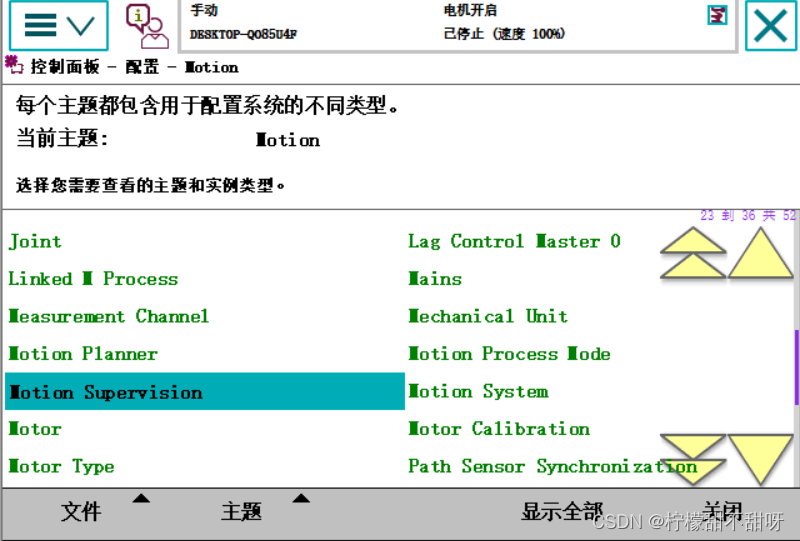
除了在监控页面进行配置的方法,还可以在系统MOTION页面进行配置,选择其中的Motion Supervision
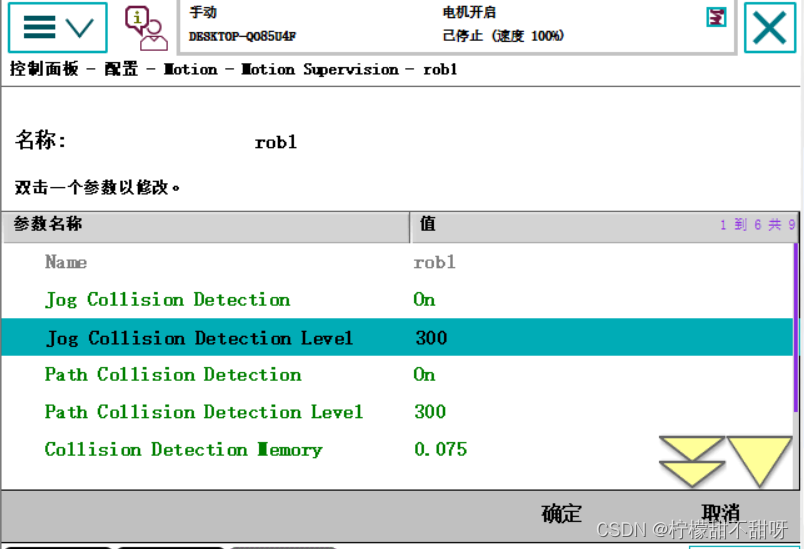
选择当前的机器人名称
Jog Collision Detection Level对应的是手动操作灵敏度调节,Path Collision Detection Level对应的路径监控灵敏度调节。
|



【本文地址】
今日新闻 |
推荐新闻 |