EMB |
您所在的位置:网站首页 › ZF卡钳工厂 › EMB |
EMB
|
文章来源:网上资料 Brake-by-Wire Actuator for Electromechanical Disc Brake 1引言 个人出行的转变已经开始。公共交通、汽车共享、最后一公里车辆的最新需求表明了舒适度和环境问题对个人来说变得越来越重要。据推测,未来乘用车将继续电气化,并提高车辆的自主驾驶能力。必要的技术改造需要包含安全和冗余的电源以及可靠的实时数据处理。有了这些先决条件,线控驾驶和线控制动等线控驾驶功能的实现似乎是最直接来实现更复杂的驾驶操作。以EMB系统为重点,指出了几个优点。由于EMB由电动装置驱动,因此无需安装液压管路或对液压系统进行维修。此外,减少了发动机舱的空间需求,控制软件可以集成到任何具有适当安全级别和足够计算能力的适当车辆控制中。在自动驾驶的情况下,EMB被认为比传统液压系统更快,因此有更多的时间用于计算自动驾驶功能。最后,由于EMB允许真正的零阻力,这将有利于电动汽车的行驶范围和减少二氧化碳。请注意,电动制动卡钳今天已经成为现实:电动驻车制动器的使用预计将在2021达到总市场的40%以上,机电制动器预计将在2027年推出[1]。 2 制动系统部件 2.1系统概述 传统制动系统通过液压主缸、液压管和液压驱动制动卡钳,将驾驶员的制动需求从制动踏板转移到车轮。为了提高车辆的制动性能,可以提供额外的助力器(真空或电液驱动)来支持驾驶员(图1)。 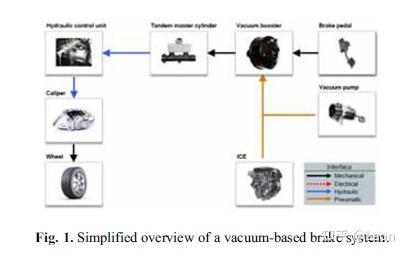 自动驾驶车辆(L3-5)不依赖驾驶员的制动请求。此外,回收制动改变了对摩擦制动器的需求和蓄电池的后续充电状态。因此,引入线控制动(BbW)系统似乎是一种合乎逻辑的演变,其中潜在驾驶员与制动卡钳机械解耦。机电制动系统的简化概述(图3)显示了几个变化。  首先,省略所有液压管和液压缸,用电线代替。如果驾驶员在控制回路(L3,4)中,他将被机械解耦,需要一种新型制动踏板,该踏板通过可靠的位置感测提供制动需求,并根据制动性能提供机械反馈。特别是当使用混合摩擦制动和回收制动系统进行制动时,BbW系统不需要使用额外的压力模拟器来调整制动感觉。XXX正在开发电动制动踏板。 其次,介绍了一种具有足够软件算法的电子控制单元。虽然控制算法可以在任何控制单元上实现,但ECU需要提供高水平的功能安全特性,以确保达到适当的ASIL水平。安全级别、正时要求和功率要求与电动转向系统中的要求非常相似。因为XXXX已经在这个市场上使用转向ECU有一段时间了,所以它可以将此专有技术转移到制动系统。 从高层次来看,所需的制动卡钳改装与其说是一场革命,不如说是一场进化。制动片的布置将保持不变,但液压缸将与机电执行器互换,需要添加精确而稳健的传感,以获得对制动事件的精确控制。感应式位置传感器通常满足传感要求。 2.2 电子踏板 电动制动踏板(图4a)模拟传统制动系统的踏板“感觉”。它将驾驶员的意图以电气方式传输到制动控制单元(BCU)。两个独立的故障冗余传感器提供瞬时信号,可根据平台特定要求进行调整。此外,可以单独调整踏板的力行程特性(图4b)。 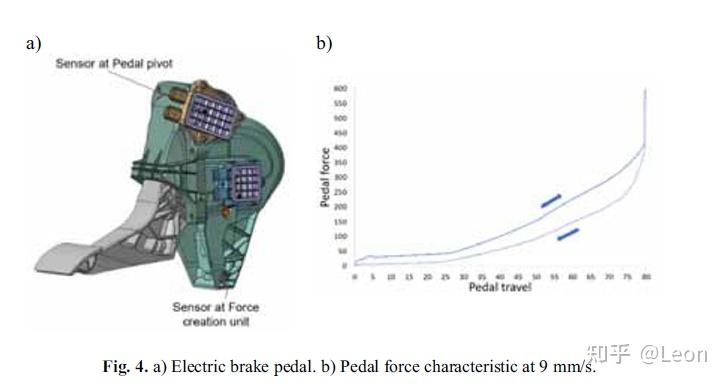 虽然踏板“感觉”不是一个安全目标,但对驾驶员的接受非常重要,但避免提交错误的制动请求(过高、过低、意外)非常关键。根据制动系统的系统架构,使用三个(最多六个)独立输出信号的同步监控来解决此问题。 此外,在没有任何机械连接进入发动机舱的情况下使用电动制动踏板在尺寸、重量(减少踏板臂长度导致尺寸更小,并允许使用塑料材料)和碰撞行为(EHB装置和制动踏板之间不需要机械连接)方面也具有优势,电动制动踏板可以很容易地与油门踏板结合,形成标准化的成本优化模块。 2.3 转向/制动ECU 自2010年以来,XXXXX一直生产用于电动助力转向(EPS)应用的电子控制单元(ECU),以支持和提高燃油效率以及自动驾驶。EPS设备允许使用电控电机提供基于需求的转向辅助:转向控制模块(SCM)根据来自传感器系统的输入信号计算所需的转向支持。SCM还控制EPS系统的电机电源,以提供适当级别的协助。HELLA不断开发其ECU,并提供故障操作版本(图5)。故障操作版本确保在电子设备出现故障的情况下,系统不会关闭,EPS将继续工作。SCM可以驱动三相或六相电机,为冗余扭矩和角度传感器提供接口,并为双电池连接做好准备。凭借故障操作功能,XXXXX为ECU适合SAE 4级自动驾驶奠定了必要的基础。从控制模块的角度来看,未来转向和机电制动系统的要求类似。 2.4 非接触式感应位置传感器 用于汽车应用的感应传感器的主要优点是其机械可变性(线性、旋转、弧段、通孔和轴端安装等)、高温范围、简单性和抗电磁干扰的鲁棒性。感应式无触点传感器由定子和转子或光标组成。(图6)定子包含励磁线圈(属于LC谐振网络的一部分)、接收器线圈和用于信号处理的电子设备。转子或光标是带有一个闭合绕组的无源元件,其设计具有特定的几何形状。   3 碟刹驱动器 3.1要求 制动卡钳安装在极端恶劣的环境中,对振动、热冲击和耐久性有严格要求。移动制动片的机电执行器也必须满足要求。最关键的参数是制动器的动态速度。在200 ms内实现16 kN的夹紧力是开发电机齿轮组合的基准。 3.2齿轮设计齿轮配置是XXXXX EMB设计的核心。齿轮系与系统的相关性如图9a所示。致动器包括齿轮、带控制器的无刷电机、位置传感器,在某些情况下,还包括停车制动器联锁机构;然而,制动系统供应商将负责将制动钳和制动ECU集成到车辆中。齿轮设计源自技术要求。在评估了几个选项后,将正齿轮和行星齿轮结合在一起的多级齿轮与永磁同步电机提供了最佳性能。齿轮系的传动比为1:75,计算得出在48 rpm的输出速度下达到约12 Nm。计算细节如图9b所示。   3.3 电机设计 根据性能要求和齿轮系计算,设计了一台永磁同步电机。为了在3600 rpm下达到0.195 Nm的工作点,确定需要一个具有九个槽和六个磁极的电机。对于给定的温度分布,选择钕铁硼磁体是因为它们提供了高效紧凑的电机设计。电机的尺寸预计为直径40 mm,轴向长度32 mm。计算出的电机特性如图10所示。3600 rpm时的工作点在20°C时的输入电流约为7.6 A,输出功率为73.6 W,从而使电机效率达到86.3%。电机的设计可以达到高达254 mNm的工作点,并且可以承受更高的短时过载条件。该设计具有安全余量。注意,在120°C时,效率下降到81.2%,但仍然可以达到工作点。  图11显示了定子和转子结构中基于有限元的磁通密度分布。分布表明,槽和定子轭的尺寸适合防止磁饱和,即使在满负荷运行下,效率也会随之降低。  .4 执行器,包括位置传感器和力测量 根据包络要求、电机定义和齿轮计算,选择了图12-14所示的执行器布局。图12显示了CAD设计,包括轴端布置中电机顶部的电机位置传感器。第一级齿轮设计为正齿轮,下一级齿轮采用行星齿轮布置,与制动卡钳中的主轴直接连接。图13中的横截面给出了更多细节。在该图像中,基于XXXX的电机位置传感器的布置清晰显示。转子直接安装在电机轴的末端。带有发送和接收线圈的印刷电路板集成在盖中。请注意,为停车制动器联锁机构预留了一些空间。  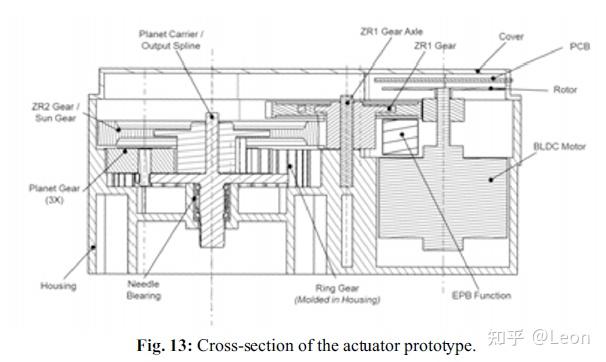 4 测试结果 4.1行车制动 图15显示了安装在试验台上并连接到最大扭矩为28 Nm的测功机上的执行器。 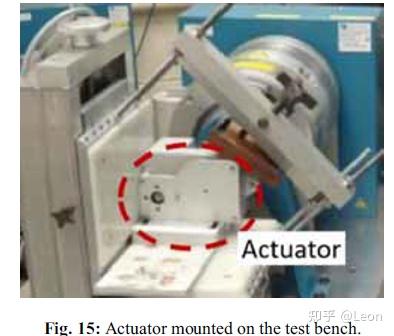 扭矩-速度曲线测试测量整个工作范围内执行器的扭矩与速度。执行器从自由运行(零负载)加载到停止(满载)。该测试使用一种方法,其中测功机制动器的开环电流从0%增加到50%。该范围是通过拉入扭矩测试确定的,以确保有足够的电流使执行器停止。由于测功机磁滞制动器的转矩-电流特性是非线性的,曲线的起点在1秒内从0%快速增加到20%,在10秒内从20%快速增加到50%。这绕过了磁滞曲线的较低部分,在该部分中,电流的大变化产生扭矩的小变化。图16显示了被测装置的测量结果,并表明致动器在停止前达到20 Nm以上的扭矩。 PULL-IN 扭矩测试旨在确定执行器可开始旋转的最大扭矩(负载)。将测功机设置为接近执行器所需拉入扭矩的开环负载。执行器通电并记录数据。如果执行器启动并继续旋转,则开环值略微增加,并重复该过程。这一过程一直持续到执行器无法在施加的负载下旋转为止。图17显示,在不到200 ms的时间内,超过了16 Nm的扭矩,因此执行器满足行车制动功能的初始要求目标。支持EPB功能所需的18 Nm扭矩输出也在250 ms内实现。  5总结 机电制动的引入有利于电动、自主驾驶车辆。因此,开发了一种电机齿轮组合,可以连接到盘式制动器卡钳上,并满足行车制动器的速度和扭矩要求。 |
【本文地址】