|
1、系统建模
二级倒立摆系统的机械部分主要是由小车、摆杆1、摆杆2、导轨、皮带轮、传送皮带等组成,电气部分由电机、功率放大器、PWM、传感器、驱动电路以及保护电路组成。系统结构如下图所示。 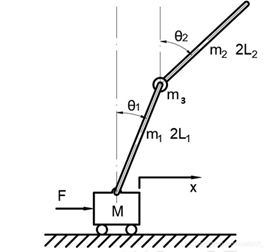 中间的推导过程不再赘述 取
x
1
=
x
x_1=x
x1=x,
x
2
=
x
˙
x_2=\dot{x}
x2=x˙,
x
3
=
θ
1
x_3=\theta_1
x3=θ1,
x
4
=
θ
˙
1
x_4=\dot{\theta}_1
x4=θ˙1,
x
5
=
θ
2
x_5=\theta_2
x5=θ2,
x
6
=
θ
˙
2
x_6=\dot{\theta}_2
x6=θ˙2,系统状态方程为: 中间的推导过程不再赘述 取
x
1
=
x
x_1=x
x1=x,
x
2
=
x
˙
x_2=\dot{x}
x2=x˙,
x
3
=
θ
1
x_3=\theta_1
x3=θ1,
x
4
=
θ
˙
1
x_4=\dot{\theta}_1
x4=θ˙1,
x
5
=
θ
2
x_5=\theta_2
x5=θ2,
x
6
=
θ
˙
2
x_6=\dot{\theta}_2
x6=θ˙2,系统状态方程为:  即得到形式如下的状态方程:
x
˙
=
A
X
+
B
U
\dot{x}=AX+BU
x˙=AX+BU
Y
=
C
X
+
D
U
Y=CX+DU
Y=CX+DU 即得到形式如下的状态方程:
x
˙
=
A
X
+
B
U
\dot{x}=AX+BU
x˙=AX+BU
Y
=
C
X
+
D
U
Y=CX+DU
Y=CX+DU
2、MATLAB程序
A=[0 1 0 0 0 0;
0 -16.6601 -1.2973 0 0.0857 0;
0 0 0 1 0 0;
0 39.0555 18.0514 0 -7.8603 0;
0 0 0 0 0 1;
0 -68.5120 -14.4458 0 25.9635 0];
B=[0;0.7270;0;-1.7044;0;0.2069];
C=[1 0 0 0 0 0;
0 1 0 0 0 0;
0 0 1 0 0 0;
0 0 0 1 0 0;
0 0 0 0 1 0;
0 0 0 0 0 1];
D=[0;0;0;0;0;0]; %这里的ABCD矩阵都可以根据具体的数值进行修改
p=eig(A) %求取A矩阵的特征值
[num,den]=ss2tf(A,B,C,D,1); %将状态空间模型转变成传递函数形式
printsys(num,den) %输出以num为分子多项式,以den为分母多项式的系统传函
Q=[1000 0 0 0 0 0;
0 0 0 0 0 0;
0 0 10 0 0 0;
0 0 0 0 0 0;
0 0 0 0 10 0;
0 0 0 0 0 0]; %根据具体要求进行修改
Tc=ctrb(A,B); %可控性
rank(Tc) %Tc矩阵的秩
To=obsv(A,C); %可观性
rank(To) %To矩阵的秩
R=1;
K=lqr(A,B,Q,R) %求取K矩阵
Ac=[(A-B*K)];
Bc=[B];
Cc=[C];
Dc=[D];
T=0:0.005:20; %时间,第一个和第三个是时间的起始和末尾,中间是采样间隔
U=0.2*ones(size(T)); %系统输入
[Y,X]=lsim(Ac,Bc,Cc,Dc,U,T); %计算系统对输入向量u的响应
plot(T,Y(:,1),':',T,Y(:,2),'-',T,Y(:,3),'*') %绘制系统的响应曲线
legend('cart position ', 'pendulum angle1' ,'angle2') %曲线的参数
grid %保留图像的栅格
|