【RobotStudio】带外部轴的ABB机器人走曲线仿真,查看关节位置曲线 |
您所在的位置:网站首页 › ABB软件怎么安装数据包 › 【RobotStudio】带外部轴的ABB机器人走曲线仿真,查看关节位置曲线 |
【RobotStudio】带外部轴的ABB机器人走曲线仿真,查看关节位置曲线
|
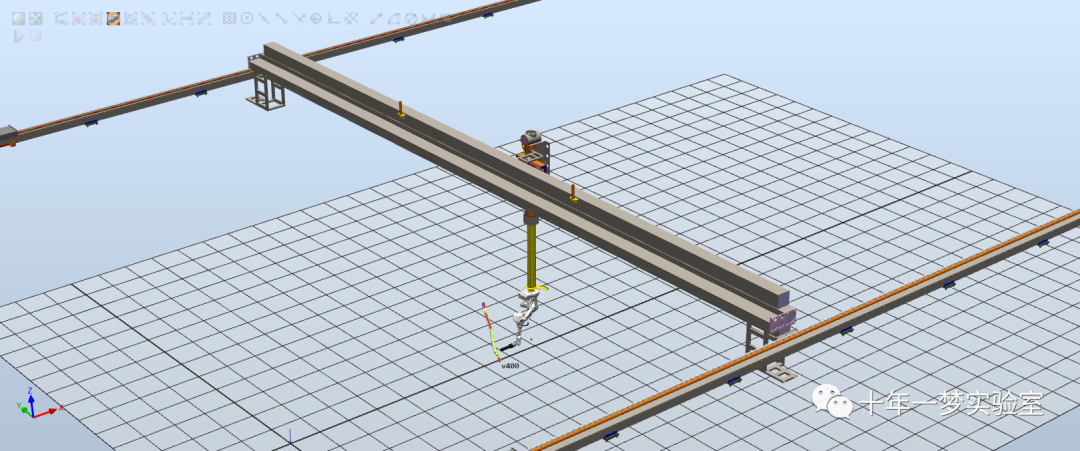
最近研究了下使用RS建立带外部轴的机械臂仿真,TCP走曲线,然后查看关节数据信号。做个笔记记录一下这个过程:
仿真录屏 一、导入零件模型 RobotStudio6.08 可以直接导入Solidworks2018建立的零件模型。导入之后,进行组合、删减不必要的部件,然后重命名。
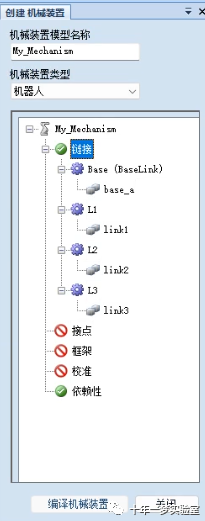
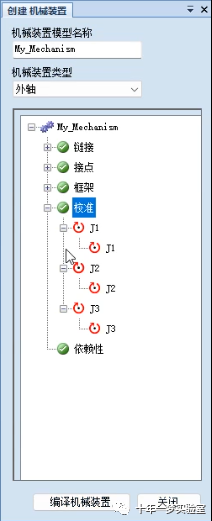
二、创建机械装置
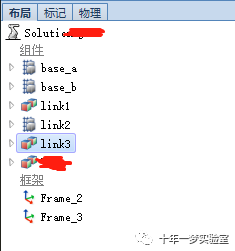
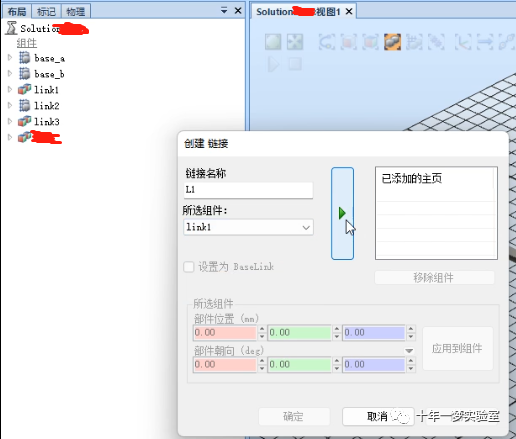
2.1 添加链接link:Base,L1,L2,L3
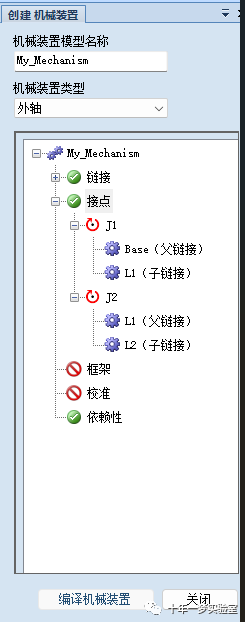
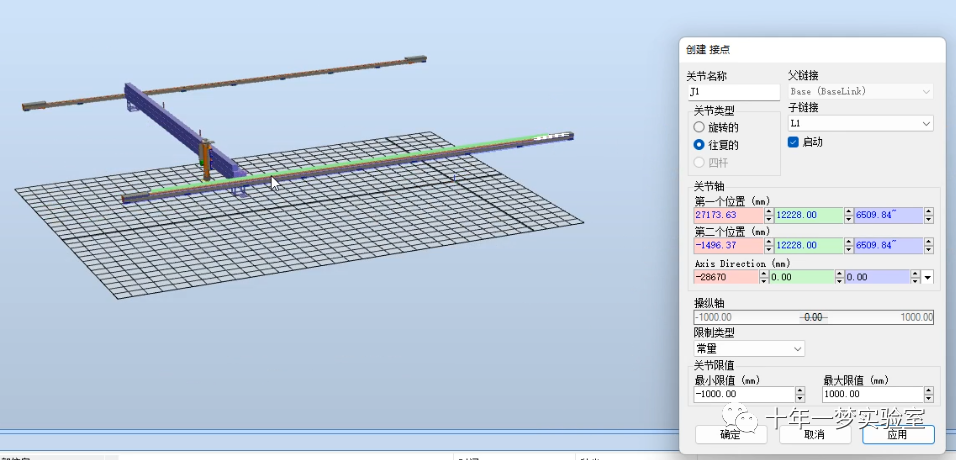
2.2 添加接点,即关节设置
鼠标单击输入框,开启捕捉圆心或者交点,捕捉XYZ坐标
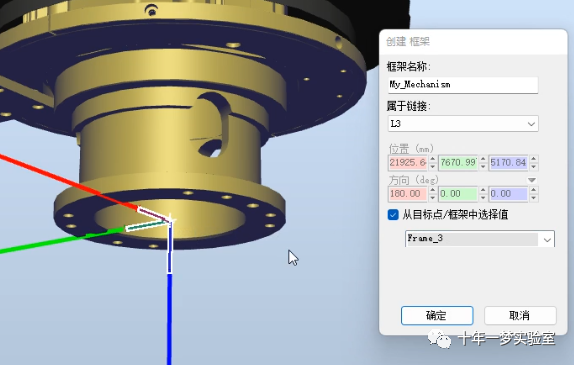
2.3、创建框架:选择外部轴末端法兰坐标系(若没有需创建)
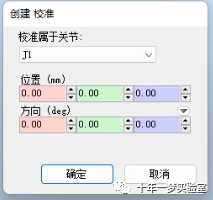
2.4、校准:各个关节的位置,三个关节依次添加校准,确定即可。机械装置类型应选择:外轴。
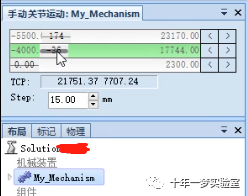
2.5最后编译机械装置,即可。编译完成的机械装置可以手动关节控制。
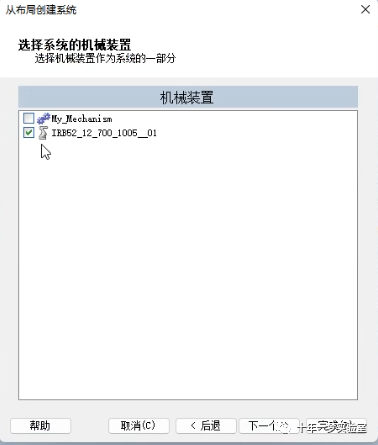
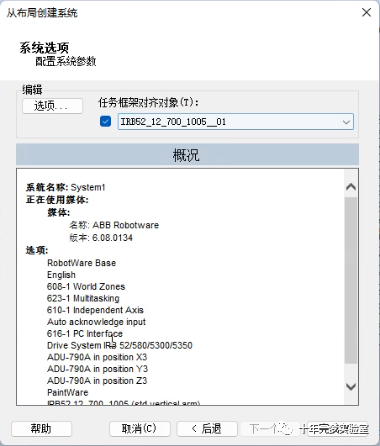
三、添加机器人 从ABB模型库里选择一个abb机器人,然后从布局创建机器人系统,此时不选择外部轴机械装置。 3.1创建机器人系统
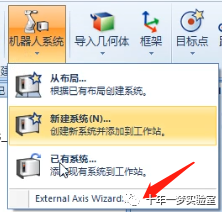
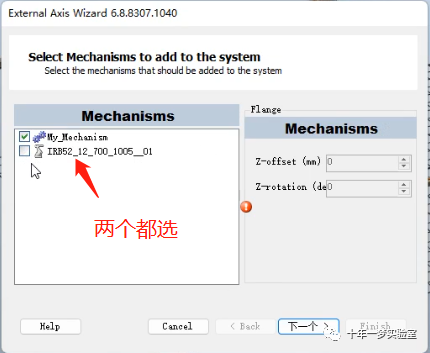
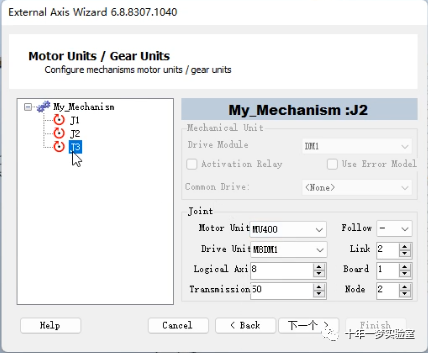
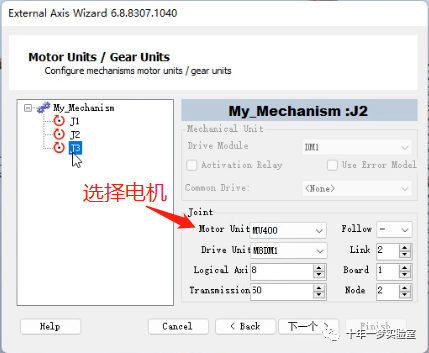
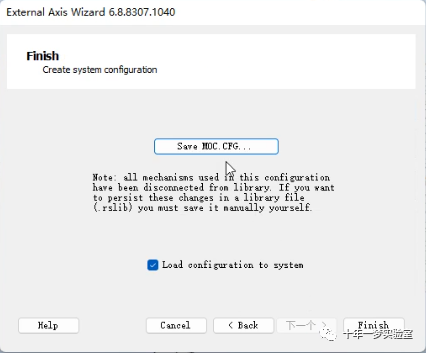
点击完成,等待系统启动完成。 3.2 外部轴向导:需从Add-Ins页面下RobotApps里下载对应版本的组件。
保存配置,完成,等待系统重启。
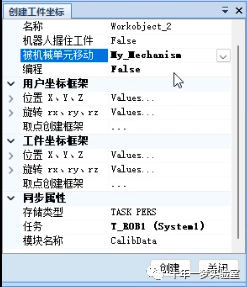
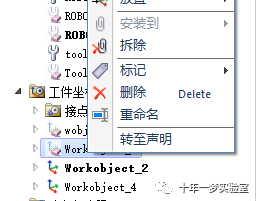
3.3创建工件坐标,并激活。
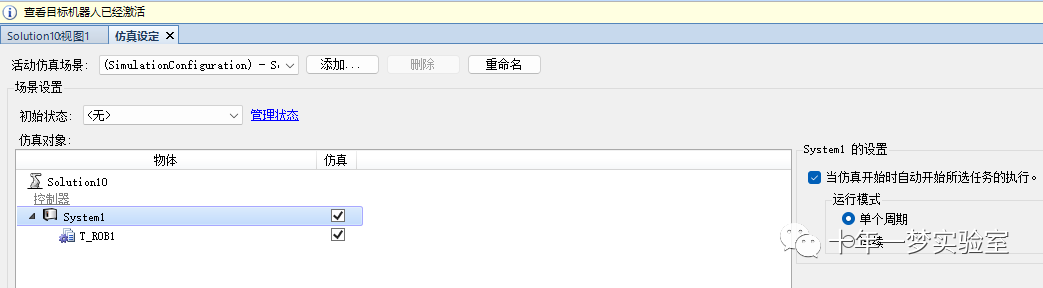
移动机械臂和外部轴到不同位置,示教指令得到路径,将路径所有指令的MoveL批量改成MoveJ, 设定路径激活并同步到RAPID,之后设定仿真连续,运行仿真,可以看到机械臂在几个位置循环走MoveJ.
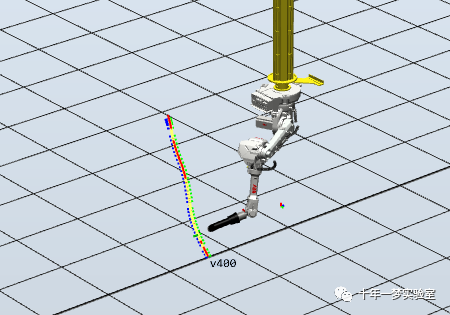
设定仿真运行模式:连续或单个周期 四、添加末端执行器,走曲线轨迹
4.1 创建的工件坐标系从机器人基座位置拆除,回到大地坐标系原点
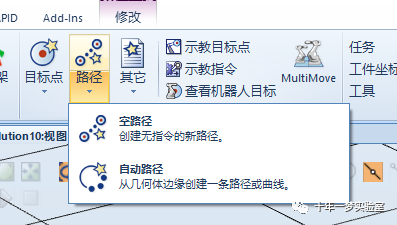
4.2. 创建自动路径:选择工件上曲线。
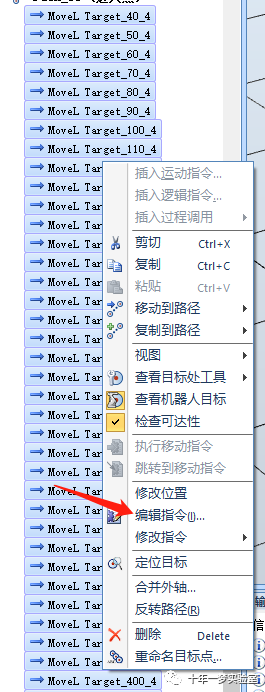
4.3 激活路径,将路径设置为仿真进入点,同步到rapid。 4.4 修改路径
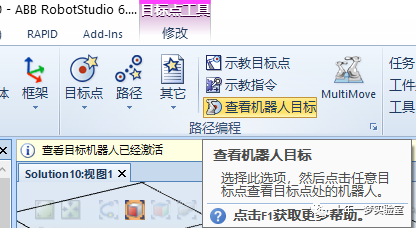
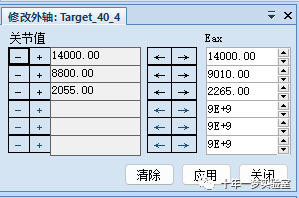
期间可能需要打开或关闭:查看机器人目标 a.对于不可达的路径点,可以将指令从MoveL改为MoveJ或者添加该目标点的MoveJ指令。 b.可以调整目标点的姿态以满足可达性和避免奇异,也可调整工具角度或者切换工具避免不可达和奇异等。 c. 对于每个目标点一般都需要修改外轴位置
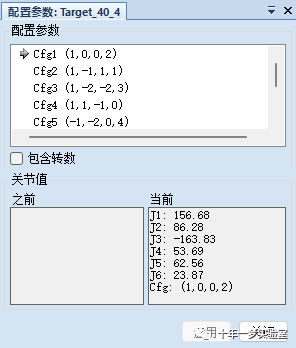
d.设定好外轴之后,选择轴配置。
e. 外部轴的位置会对目标点的可达性、奇异性产生影响。选择的好可以避免很多报错。选择不好很容易出现位置不可达,移动指令经过奇异点,轴配置无解等。 f. 可选择多条指令,批量修改指令
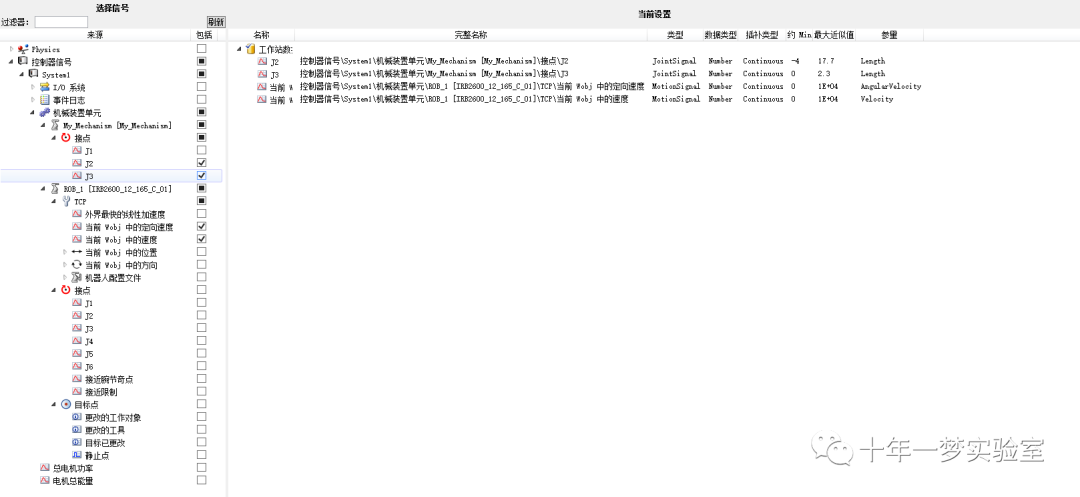
4.5 信号设置,仿真过程中监视的信号
点击仿真页面的播放按钮,通过信号分析器查看仿真数据曲线:
信号分析器可以查看关节位置数据,无法直接查看关节速度或者加速度数据。 The End |




【本文地址】
今日新闻 |
推荐新闻 |