江科大自化协51单片机学习笔记(红外遥控部分) |
您所在的位置:网站首页 › 51单片机红外遥控器怎么配对 › 江科大自化协51单片机学习笔记(红外遥控部分) |
江科大自化协51单片机学习笔记(红外遥控部分)
|
红外遥控(外部中断)
本篇文章是根据B站UP主江科大自化协的教学视频51单片机入门教程-2020版 程序全程纯手打 从零开始入门,在了解、学习与实操后整理的学习笔记,通过已有的不同晶振(11.0592KHz)的开发板对代码进行了部分优化,同时自行整理了较为详细的实例思路。内容较为详细,部分内容涉及了前面的知识点,可以观看UP主的视频或接下来的一些文章进行了解。 希望大家都能早日掌握单片机。 文章目录 红外遥控(外部中断)1、红外遥控介绍(1)基本介绍(2)硬件电路Ⅰ、红外发送电路(调制)①输入38KHz方波调制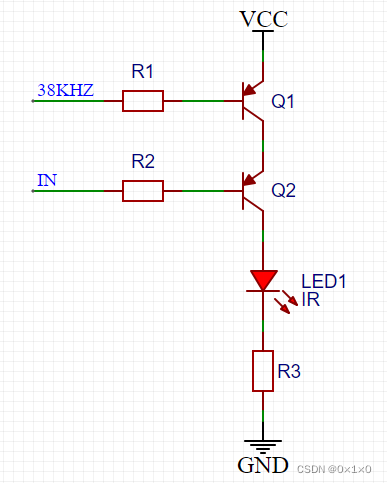②自行调制 Ⅱ、红外接收电路(解调)Ⅲ、基本发送与接收 2、NEC编码(1)红外NEC协议编码说明(2)对应红外接收键码实例波形 3、外部中断4、实例(1)红外遥控Ⅰ、实际效果Ⅱ、思路①详细思路说明②前期准备③定时器改计时器。④引入外部中断⑤方波信号类型的判断与解码⑥主函数逻辑 Ⅲ、实际代码①Timer0.c②Int0.c③IR.c④main.c (2)红外遥控电机调速Ⅰ、实际效果Ⅱ、思路Ⅲ、实际代码①Timer1.c②Motor.c③main.c 1、红外遥控介绍 (1)基本介绍 红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出。 通信方式:单工,异步; 红外LED波长:940nm; 通信协议标准:NEC标准。 (2)硬件电路 Ⅰ、红外发送电路(调制) ①输入38KHz方波调制
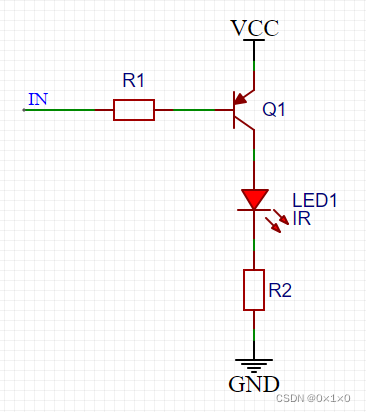
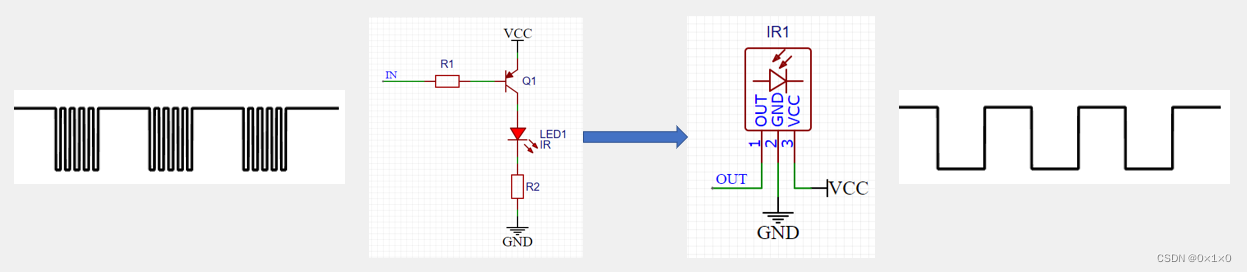
51单片机并没有发送红外的功能,只接受遥控器发出的红外信号。 R1所在电路输入端为38KHZ的方波,R2所在电路(IN口)为输入波形; 两个三极管开关(PHP型)为低电平导通(高电平不导通); 利用两个三极管,将38KHZ的方波和输入波形组合(抗干扰),对应控制红外LED的闪烁。 ②自行调制
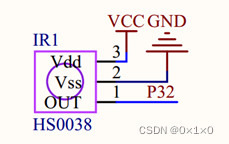
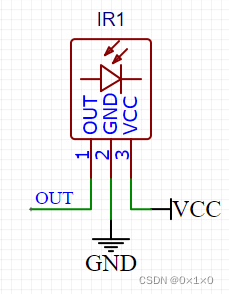
红外接收头能将接收到的经调制的波形进行解调,使得其恢复原来的波形。
利用一体化红外接收头(集成有解调电路),就可以直接帮助解调,无需自行处理。 因为产生的波形抖动速度快、时间短,因此不能利用if语句进行判断,需要引入外部中断进行接收OUT产生的波形数据,P3^2即为外部中断的接口。 Ⅲ、基本发送与接收空闲状态:红外LED不亮,接收头输出高电平; 发送低电平:红外LED以38KHz频率闪烁发光,接收头输出低电平; 发送高电平:红外LED不亮,接收头输出高电平。
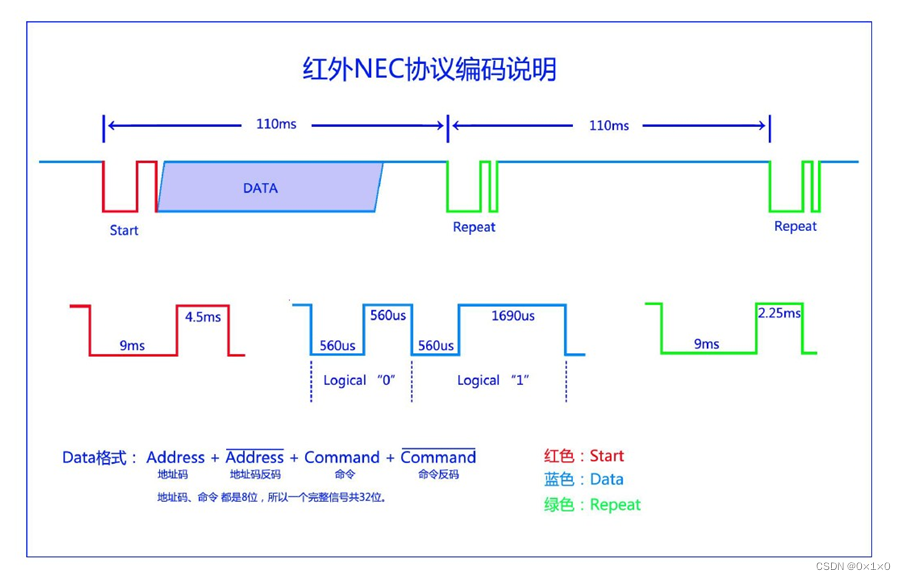
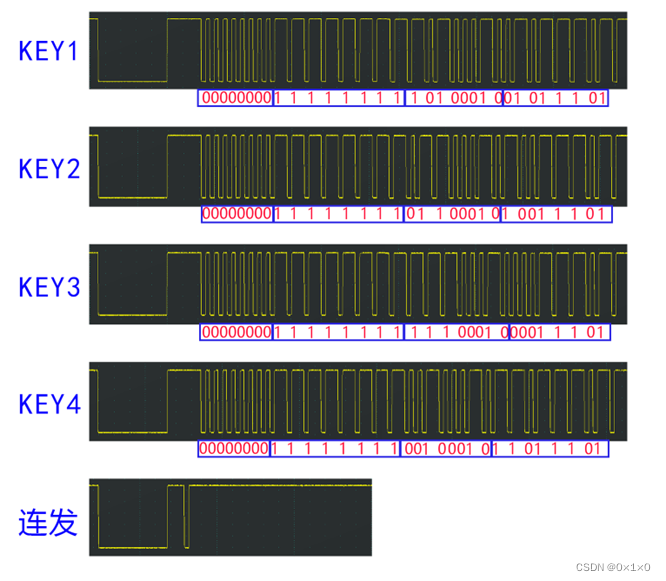
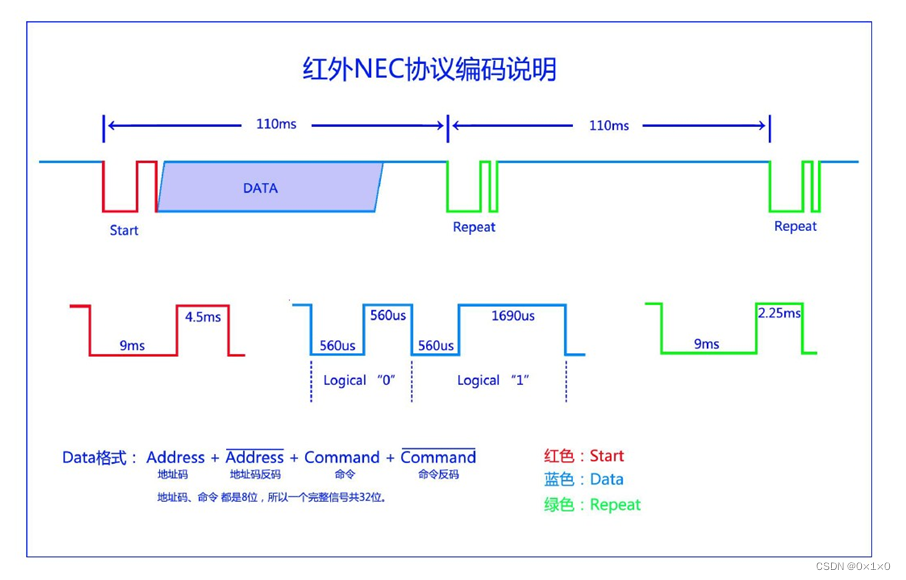
地址码反码对地址取反,用于对地址码进行验证;命令反码同理。 数据红外接收部分,560us的下降沿与560us的上升沿组成数据0;560us的下降沿与1690us的上升沿组成数据1; 一帧数据时间长度为110ms; 后面的Repeat部分为按住按键不放时,连续发送数据的波形。 (2)对应红外接收键码实例波形
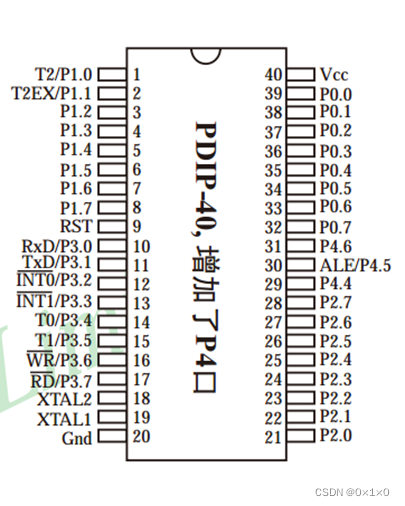
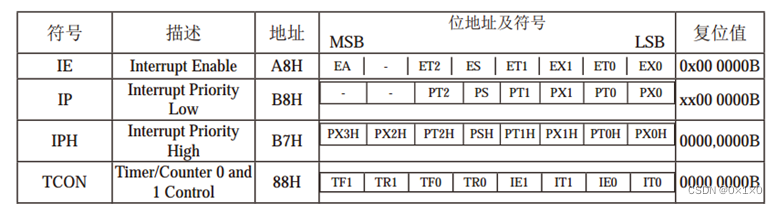
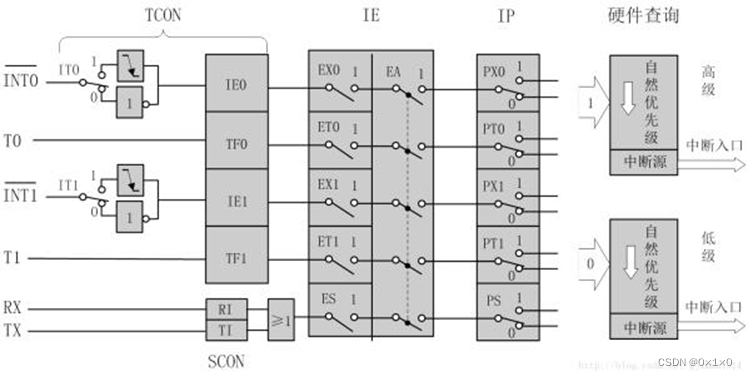
STC89C52有4个外部中断,STC89C52的外部中断有两种触发方式: 下降沿触发和低电平触发。
外部中断INT0与INT1直接连接I/O口(区别于T0之类的定时器中断); IT0与IT1:外部中断触发方式选择位,为1下降沿触发,为0低电平触发; IE0与IE1:中断请求标志位; PX0与PX1:外部中断优先级控制位。 4、实例 (1)红外遥控 Ⅰ、实际效果 在LCD1602液晶屏上显示遥控器的地址码和控制码(即键码);当按下VOL+与VOL-时,分别对数字进行加减,且长按能一直进行。 Ⅱ、思路
该实例的主要难点在于编写解码部分的函数,首先,从NEC协议编码说明中可看出:解码部分对时间测量有一定要求,数据位的判断是微妙级的,因此我们需要一个用于计时的工具,这里我们使用定时器Timer0,但不启用中断将其改写为一个计时器;其次是对计时范围的选定,我们需要对每个方波周期计时,进行判断然后清0,这里我们引入外部中断Int0,使用下降沿触发,通过两次中断就能读出一个对应方波周期的时间;最后是对方波信号类型的判断与解码,包括三种状态:空闲状态0、等待信号状态1(等待Start和Repeat信号)、读取数据状态2。以上的内容我们通过**建立三个不同的库(Timer0.c、Int0.c和IR.c)**并在其中编写对应功能函数,便可基本实现前两个效果,其余效果只需在主函数中进行逻辑编写即可完成。 ②前期准备 时间:(第一个是12.0000KHz时,第二个是11.0592KHz时) Start信号:(9+4.5)ms=13.5ms=13500us;*0.9216=12442us。Repeat信号:(9+2.25)ms=11.25ms=11250us;*0.9216=10368us。"0"信号:(560+560)us=1120us;*0.9216=1032us。"1"信号:(560+1690)us=2250us;*0.9216=2074us。 ③定时器改计时器。 对原有的定时器中断初始化函数Timer0_Init() 进行修改: 因为不需要进行中断,因此把中断允许位EA、ET0和优先级控制位PT0删除;因为用于计时,则不需要对TH0和TL0赋初值,将TH0和TL0置0;因为我们要控制计时的开始与结束,所以在初始化中将定时器运行控制位TR0先置0; 添加函数(计时器控制函数Timer0_Run()、计时器设置函数Timer0_SetCounter()和计时器取值函数Timer0_GetCounter()): Timer0_Run():带参数,参数为标志位Flag,通过标志位控制计时器的启动与停止;Timer0_SetCounter():带16位参数,参数为初值Value,高八位存于TH0,低八位存于TL0;此处可用于置0;Timer0_GetCounter():有16位返回值,返回计时器的值。 先用Timer0_SetCounter()将初值置0,再通过Timer0_Run()启动定时器,中间放入程序,最后使用Timer0_GetCounter()取出计时器的值即可计算程序运行的时间。 ④引入外部中断 对与外部中断有关的寄存器进行设置: 外部中断0请求标志IE0:置0(详解看手册);外部中断0触发方式选择位IT0:置1,下降沿触发中断;全局中断允许位EA:置1,允许;外部中断允许位EX0:置1,允许;外部中断0中断优先级控制位PX0:置1,高优先级。 中断函数的设置:因为每次中断就会读取方波信号周期时间,因此我们将方波信号类型的判断与解码放在外部中断函数中。 ⑤方波信号类型的判断与解码 定义变量: 存储时间的变量IR_Time:用于存储每次计时器取出的时间值,便于判断信号类型; 控制状态的变量IR_State:0为空闲状态、1为等待信号状态(等待Start和Repeat信号)、2为读取数据状态; 存储数据的数组IR_Data[4]:数据共有4个字节共32位; 指向数据位数的指针IR_pData 数据解码标志位IR_DataFlag:为0表示数据解码未完成,为1表示数据解码已完成; 数据重写标志位IR_RepeatFlag:为0表示数据不重写,为1表示数据重写; 地址存储变量IR_Address:存储数据中的地址,便于调用与显示; 命令存储变量IR_Command:存储数据中的命令,便于调用与显示。 判断与解码(中断函数内): 空闲状态0:若处于空闲状态,则开启计时,进入等待信号状态; 等待信号状态1:取出计时器数据后清0,判断信号为Start信号还是Repeat信号,若为Start信号,则进入读取数据状态;若为Repeat信号,则将IR_RepeatFlag置1,停止计时,回到空闲状态; 读取数据状态:取出计时器数据后清0,判断信号为"0"信号还是"1"信号,对应位赋值(难点),然后IR_pData+1;若IR_pData加至32,则已完成数据读取,然后将IR_pData清0,检验数据是否正确(反码取反),若正确,将地址和命令分别存至IR_Address和IR_Command,随后计时器停止,返回空闲周期; 误差:由于程序运行等原因,计时器的时间是有一定误差的,因此我们在判断时要对准确时间前后留有余量;若超出这个范围(出现错误),则返回等待信号状态; 重写的使用在主函数中体现。 其他函数: 调用:因为IR_Address和IR_Command是对应库中的变量,主函数不能直接调用,为了取出其值,我们再定义两个有返回值的函数IR_GetAddress()和IR_GetCommand(),专门用来返回IR_Address和IR_Command的值;显示:IR_DataFlag和IR_RepeatFlag原因同上,它们在主函数中的作用是作为标志位决定是否调用显示,不过在对他们定义的两个有返回值的函数IR_GetDataFlag()和IR_GetRepeatFlag中,需要将它们置0,便于下次数据读取判断。 ⑥主函数逻辑 对数据解码标志位和数据重写标志位进行判断,只要其中一个为1就显示数据;对命令进行判断,若命令的值为"VOL+"的键码,则数字+1;为"VOL-"则-1;为了便于调用,可以对所有的键码值进行宏定义。 Ⅲ、实际代码 ①Timer0.c #include /** * @brief 定时器0初始化 * @param 无 * @retval 无 */ void Timer0_Init(void) { TMOD &= 0xF0; //设置定时器模式 TMOD |= 0x01; //设置定时器模式 TL0 = 0; //设置定时初值 TH0 = 0; //设置定时初值 TF0 = 0; //清除TF0标志 TR0 = 0; //定时器0不计时 } /** * @brief 定时器0设置计数器值 * @param Value,要设置的计数器值,范围:0~65535 * @retval 无 */ void Timer0_SetCounter(unsigned int Value) { TH0=Value/256; TL0=Value%256; } /** * @brief 定时器0获取计数器值 * @param 无 * @retval 计数器值,范围:0~65535 */ unsigned int Timer0_GetCounter(void) { return (TH0 |

【本文地址】
今日新闻 |
推荐新闻 |