你不能错过的知识:PID算法及参数整定! |
您所在的位置:网站首页 › 4:1衰减比例法得到的pid参数 › 你不能错过的知识:PID算法及参数整定! |
你不能错过的知识:PID算法及参数整定!
|
上式中,为了表示方便,将类似于e(kT)简化成ek 形式就可以得到离散的PID表达式:
或写成
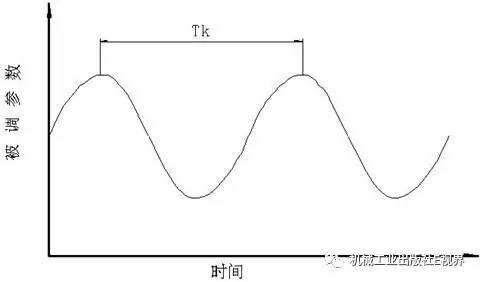
此公式即为位置式的PID表达式。 式中:k——采样序号,k=0,1,2,… yk ——第k 次采样时刻的计算机输出值 e k ——第k 次采样时刻输入的偏差值 e k −1 ——第k-1 次采样时刻输入的偏差值 K I ——积分系数。K I =KP*T/TI 积分时间TI即为累积多少次/个T) KD ——微分系数。K D =KP*TD /T 如果采样周期取得足够小,则以上近似计算可获得足够精确的结果,离散控制过程与连续控制过程十分接近。 式中:k——采样序号,k=0,1,2,… yk ——第k 次采样时刻的计算机输出值 e k ——第k 次采样时刻输入的偏差值 e k −1 ——第k-1 次采样时刻输入的偏差值 K I ——积分系数。K I =KP*T/TI 积分时间TI即为累积多少次/个T) KD ——微分系数。K D =KP*TD /T 如果采样周期取得足够小,则以上近似计算可获得足够精确的结果,离散控制过程与连续控制过程十分接近。 2.增量式表达式 利用上面的公式,可得出第k次采样、第k-1次采样时的输出调节量yk、yk-1,用yk-yk-1,即得增量式PID表达式,如下: 3.PID参数的工程整定方法 参数整定的方法很多,我们只介绍几种工程上最常用的方法。最实用的是试凑法。 1)临界比例度法 这是目前使用较广的一种方法,具体作法如下: 先在纯比例作用下(把积分时间放到最大,微分时间放到零),在闭合的调节系统中,从大到小地逐渐地改变调节器的比例度,就会得到一个临界振荡过程,如图8所示。这时的比例度叫临界比例度δk,周期为临界振荡周期Tk。记下δk和Tk,然后按表1的经验公式来确定调节器的各参数值。
表1 临界比例度法数据表
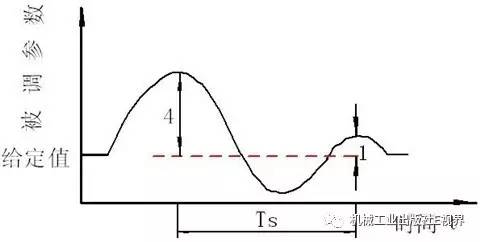
这种方法在下面两种情况下不宜采用: a)临界比例度过小,因为这时候调节阀很容易处于全开及全关位置,对于工艺生产不利,举例来说,对于一个用燃料油(或瓦斯)加热的炉子,如δ很小,接近双位调节,将一会儿熄火,一会儿烟囱浓烟直冲。 b)工艺上约束条件较严格时,因为这时候如达到等幅振荡,将影响生产的安全运行。 2)衰减曲线法 临界比例度法是要系统等幅振荡,还要多次试凑,而用衰减曲线法较简单,一般又有两种方法。 (1)4:1衰减曲线法 使系统处于纯比例作用下,在达到稳定时,用改变给定值的办法加入阶跃干扰,观察记录曲线的衰减比,然后逐渐从大到小改变比例度,使出现4:1的衰减比为止,如下图所示。记下此时的比例度δs和Ts的值,再按表2的经验公式来确定PID数值。
表2 4:1衰减曲线法数据表
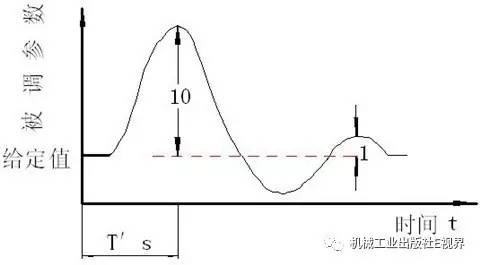
(2)10:1衰减曲线法 有的过程,4:1衰减仍嫌振荡过强,可采用10:1衰减曲线法。方法同上,得到10:1衰减曲线,记下此时的比例度δ's和上升时间T's,再按表3的经验公式来确定PID的数值。衰减曲线如下图所示。
表3 10:1衰减曲线法数据表
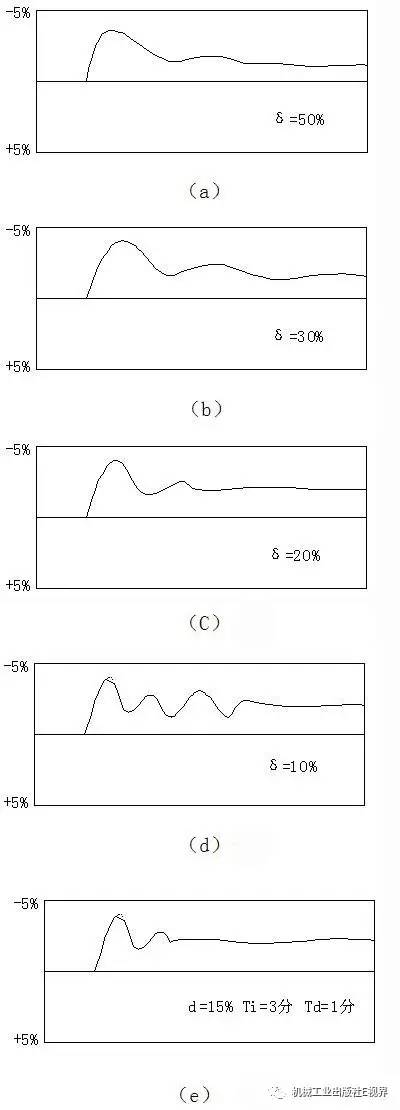
采用衰减曲线法必须注意几点: a)加给定干扰不能太大,要根据生产操作要求来定,一般在5%左右,也有例外的情况。 b)必须在工艺参数稳定的情况下才能加给定干扰,否则得不到正确得δs、Ts、或δ's和T's值。 c)对于反应快的系统,如流量、管道压力和小容量的液位调节等,要在记录纸上严格得到4:1衰减曲线较困难,一般以被调参数来回波动两次达到稳定,就近似地认为达到4:1衰减过程了。 下面举一个现场整定的例子。在某塔顶温度调节系统中,被调参数是塔顶温度,工艺允许波动为<4℃,调节参数是回流量。在整定过程中,考虑到对象滞后较大,反应较慢的情况,δ的选择从50%开始凑试起,此时在阶跃作用下(给定值降低2%)的过渡过程曲线见下图(a)。此时调节时间长,不起振荡,于是将比例度减少,δ=30%、20%、及10%时的曲线见(b)、(c)、(d)。显然,20%的情况最好,衰减比接近4:1,Ts=10分。 按4:1衰减曲线法数据表定出整定参数: δ=0.8·δs=16%; Ti=0.3·Ts=3分; Td=0.1·Ts=1分。 投运时,先将δ放在较大的数值,把Ti从大减少到3分,把Td从小到大逐步放大到1分,然后把δ拉到15%,(如果在δ=15%的条件下很快地把Td放到1分,调节器的输出会剧烈变化)。再对系统加2% 的给定值变化时,仍产生4:1衰减过程,见图(e)所示,调节质量显著改善,超调量小于1℃,调节时间为6.5分。
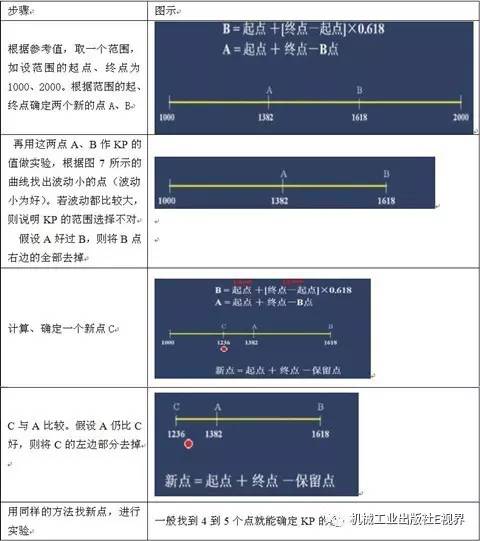
3)经验试凑法 这是在生产实践中所总结出来的方法,目前应用最为广泛,其步骤简述如下: (1)确定KP 可用“优选法”,详见下表 表4 优选法确定KP
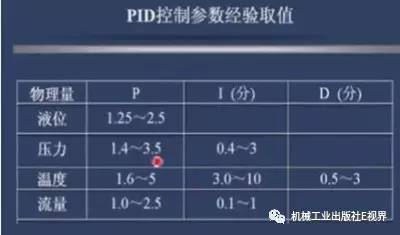
(2)看曲线,调参数,根据操作经验,看曲线的形状,直接在闭合的调节系统中逐步反复试凑,一直得到满意数据。 在实践中,把具体整定的方法总结了几段顺口溜: 参数整定找最佳,从大到小顺次查, 先是比例后积分,最后才把微分加; 曲线振荡很频繁,比例度值要放大, //比例度放大即比例系数KP要减小。 曲线漂浮绕大弯,比例度值应减小; 曲线偏离回复慢,积分时间往下降, 曲线振荡周期长,积分时间再加长; 曲线振荡频率快,先把微分降下来, 动差大来波动慢,微分时间应加长; 理想曲线两个波,前高后低四比一, 一看二调多分析,调节质量不会低。 参数整定找最佳,从大到小顺次查, 先是比例后积分,最后才把微分加; 曲线振荡很频繁,比例度值要放大, //比例度放大即比例系数KP要减小。 曲线漂浮绕大弯,比例度值应减小; 曲线偏离回复慢,积分时间往下降, 曲线振荡周期长,积分时间再加长; 曲线振荡频率快,先把微分降下来, 动差大来波动慢,微分时间应加长; 理想曲线两个波,前高后低四比一, 一看二调多分析,调节质量不会低。 第一段讲的是整定顺序,δ和Ti都是从大到小逐步加上去,微分是最后才考虑的。第二段讲的是比例度如何整定。第三段讲的是积分时间如何整定。第四段讲的是微分时间如何整定。第五段讲的是标准。 上面这种方法步骤是先加δ,再加Ti,最后才加Td。应用中较稳妥。 另一种方法是先从表列范围内取Ti的某个数值,如果需要微分,则取Td=(1/3~1/4)Ti,然后对δ进行试凑,也能较快地达到要求。 常用PID控制参数的经验值如下图所示。
到这里,本期PID算法及参数整定的知识就给大家介绍完了,如果大家有什么想说的可以在下面留言哦! 本文选自《》,由机械工业出版社E视界整理发布。 点击菜单“更多互动”-“微信群”申请加入交流学习群!返回搜狐,查看更多 |






【本文地址】
今日新闻 |
推荐新闻 |