人手抓取运动轨迹研究 |
您所在的位置:网站首页 › 3维人体运动轨迹 › 人手抓取运动轨迹研究 |
人手抓取运动轨迹研究
|
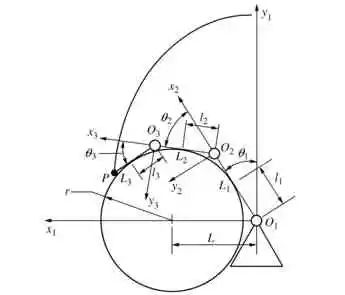
1.2 手指运动特征 手在运动时,食指、中指、无名指、小指的运动特征相同,运动实际只发生在一个平面内[15]。大拇指相对于四指的运动,区别在于掌腕关节的特殊位置,平面运动分析方法与四指相同。针对“握”动作为例进行运动结构图分析,如图1所示。
图1 手指握取结构图 将各指节看作连杆通过关节链接而成,根据人手运动习惯定义各关节转角范围,θ1为根指节的运动角度,取值范围为0~90°,θ2表示中指节的相对转角,以根指节作为参考轴,转角最大值为110°,θ3是以中指节为参考轴表示端指节的运动角度,生理限制较大,最大转动范围为80°,θ1、θ2、θ3决定指端位置和运动速度。人手在握取物体时,手指皆与被握取物体充分接触,各指节与物体相切,由根指节驱动,手指以一种相对稳定姿态向目标物体移动,指尖沿固定轨迹运动,见图1。触碰到物体后指节进行轻微调整从而完成抓取动作,由图1中的几何关系看出,运动控制时关节转动角度与抓取物体的形状有关。 图1原点Oi到指节与物体切点的距离分别为l1、l2、l3,设定物体中心与根关节距离为L,r为手指切面内物体的半径,根据图1几何关系可得原点至切点距离如下:
(1) 在实际的抓取过程中,手指的指节运动角度相互耦合,面向不同的物体,手会产生不同的抓取手势,所应用到的手指数量也不同,为保证稳定抓取,本文考虑手部抓取调用全部手指,单手指各关节转动角度与物体尺寸和位置表达关系式为:
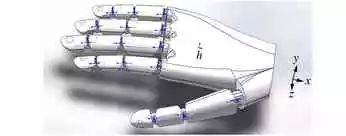
(2) 指尖T在平面坐标系x1o1y1中的位置表示如下: (3) (4) 2 人手运动学分析 2.1 正向运动学分析 根据对人手的结构分析,构建了虚拟手的三维模型,每根手指都视作3个连杆和3个节点组成的机构,如图2所示。每个关节处存在一个局部坐标系 (m对应手指上1,2,3关节,n取5个手指的英文首字母t, i, m, r, p),手掌中心处存在一个局部坐标系h,以确定手的相对位置。
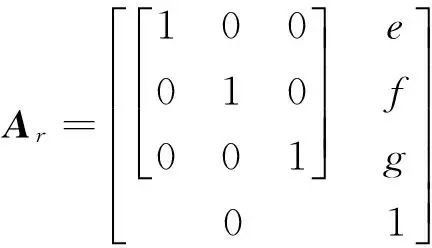
图2 虚拟手三维空间坐标图 食指根关节处的空间坐标系映射至图1为平面坐标系x1o1y1,以图2中右侧坐标系i-xyzo作为基准坐标系,a=(e,f,g)为从基准坐标系至手心局部坐标系h的向量,以确定手在三维空间内的方位。手在运动过程中包括移动和旋转两种情况,发生移动时,通过基准坐标系与局部坐标系h间进行矩阵变换可确定局部坐标系原点的位置,转换矩阵如下:
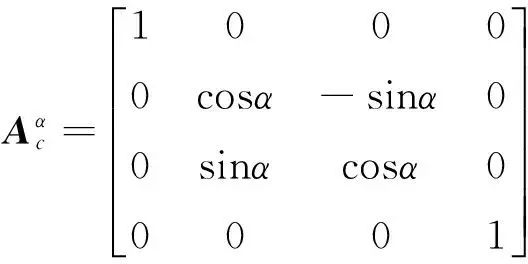
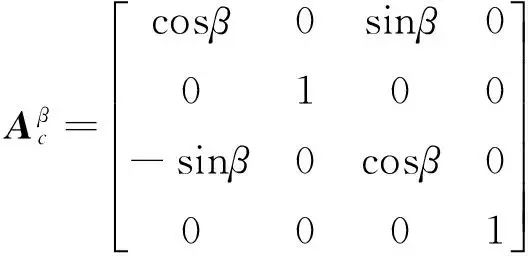
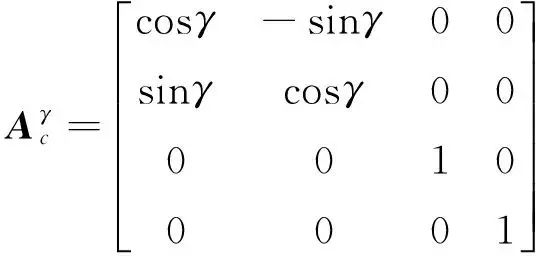
(5) 发生旋转时,首先以x轴为中心轴旋转α,再以y轴为轴心旋转β,最后以z轴为轴心旋转γ,转换到局部坐标系h,转换矩阵如下:
(6)
(7)
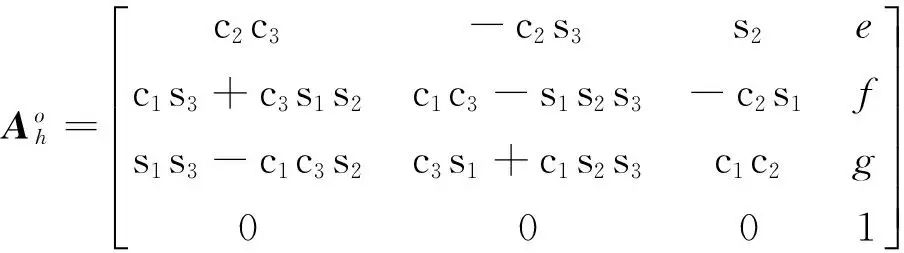
(8) 从世界基准坐标系o到局部坐标系h的转换矩阵可表示为
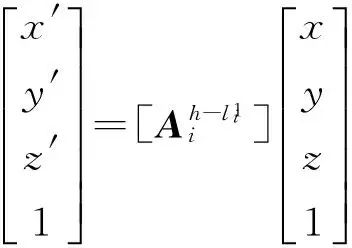
(9) 式中:c1、c2、c3、s1、s2、s3分别对应cosα、cosβ、cosγ、sinα、sinβ、sinγ。 以αn(n=t, i, m, r, p)表示从局部坐标系h至各手指根关节坐标系的位置向量,表示关节坐标系至的向量。 由图2可知,手指根关节处坐标系与手掌坐标系h的关系为:五指坐标系均与h坐标系处于同一平面内,拇指坐标系即h坐标系绕y轴旋转180°,再平移固定矢量得到;其余四指根关节坐标系均由h坐标系绕z轴旋转-90°,再平移一定矢量得到,该矢量用αn表示。例如食指的平面坐标系与手掌局部坐标系h的变换关系可表示为 (10) 这里a,食指根关节坐标系 转换矩阵根据式(9)和(10)得,因此指尖在世界基准坐标系下的位置为:
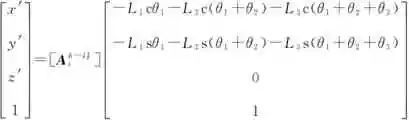
(11) 将图1中手指平面坐标系x1o1y1映射至图2根关节处三维坐标系内,由于不考虑手指在z轴上的摆动,故指尖在基准坐标系中的位置为:
(12) 式中:c代表cos;s代表sin。 2.2 逆向运动学分析 逆向运动学分析是已知手指指尖位置计算出各关节转角,假设已知手指的坐标位置,则由式(10)可反解出指尖在平面坐标系中的位置:
(13) 进而反解出手指在该状态下的关节转角。以食指为例,已知食指指尖在世界基准坐标系中位置为(p1,p2,p3)T,手掌处于初始状态与基准坐标系重合,由式(13)可知食指在根坐标系中的位置:
(14) 已知食指各指节长度L1=36 mm,L2=29 mm,L3=23 mm,u=-37 mm,指尖方位角则为
令
,进一步计算得出
同理可得
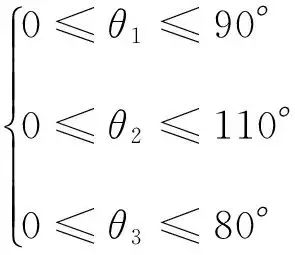
D1=u-p2-L1sinθ1;D2=p1-L2cosθ1;θ1=θ-θ2-θ3,3个角的范围分别为:
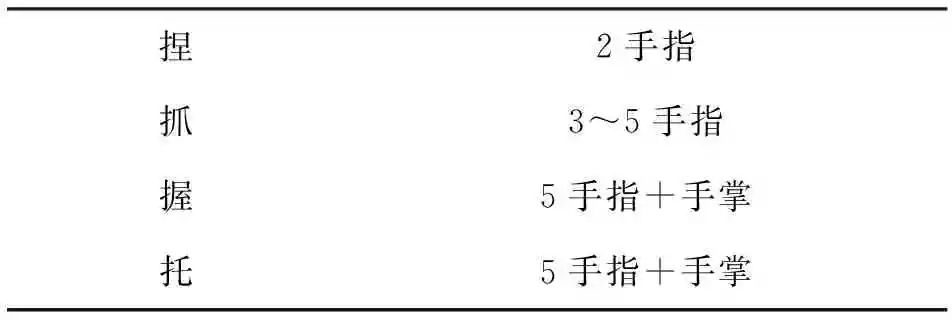
本文中握姿分析中五指的逆运动分析方法与食指方法相同。 3 抓取操作实现研究 3.1 抓取规则设定 人手在进行移动、旋转、抓取物体时,为了在提高抓取效率的前提下同时保证抓取的准确性,需要建立一系列的抓取规则约束定义抓取过程。抓取规则是针对人手而建,能够提高抓取效率,实现抓取的稳定性,最终完成抓取操作。 1) 人手在抓取过程中,手指最终抓取姿态与待抓取对象的尺寸、形状、重量以及操作动作有关,常见的抓取手势有捏、抓、握、托,见表1所示。 表1 抓取手势
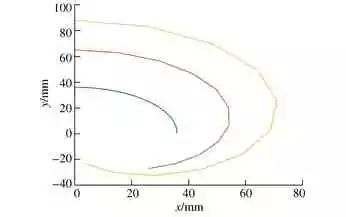
抓取时,为保持动作的稳定性,设定调动全部手指参与运动,并保证大拇指始终参与。 2) 同一物体,可采用表1中不同的抓取手势,但是在抓取过程中,不限制手势的唯一性,优先选择与抓取目的以及运动习惯相近的手势。 3) 手指接触物体时必有拇指与至少一手指基于物体轴心的向量满足Nt·Nn≥0 (n=i, m, r, p)。 4) 抓握较大物体时,物体中心轴线与四指根关节处于同一平面内,保证稳定抓取。 规则(1)和(2)是进行抓取的前提,基于前两个规则确定抓取手势进行抓取,若没有调用足够的手指或拇指未参与抓取,自动视为放弃抓取。规则(3)和(4)是稳定抓取的保证,由于物体的位置影响指尖运动轨迹,因此调整物体中心轴与中指根关节同轴线才能保证运动轨迹构建过程的准确性,当虚拟手运动与物体接触时,如果手指接触点没有满足规则(3),则会导致抓取失败,此规则同样作用于不规则物体。当手满足所有的抓取规则后则判为抓取成功,此时抓取对象与人手模型同步运动。 3.2 运动轨迹仿真 以食指为例,3个指节长度分别为:36 mm,29 mm,23 mm,不考虑手指左右伸展,三关节的最大弯曲角度(90°,110°,80°),以手指平行于手掌面为初始状态,对食指运动轨迹方程使用MATLAB进行二维仿真,得到各关节点的运动轨迹如图3所示。
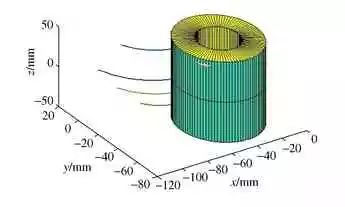
图3 食指运动轨迹图 由图3可看出,食指在空握姿势时整体的运动曲线,当手在握取半径为30 mm的轴状物体时,指尖在空间内的运动轨迹及轴的位置如图4所示。
图4 五指指尖握轴时运动轨迹 根据指尖位置方程(12)可得到指尖的最终落点位置,以食指和拇指为例,最终指尖位置坐标分别为(-45.84,-20.56,38.33)、(-70.79,-79.90,53.95),根据抓取规则4)知物体轴心为(-40,-41,0),根据抓取稳定规则3),计算得出食指与拇指基于物体轴心向量Nt·Ni≥0,满足稳定抓取条件,验证了本文建立的运动轨迹方程在基准坐标系下的有效性。 3.3 抓取实例 验证轨迹方程后,以轴状物体为例,在SolidWorks2015环境下构建的虚拟手模型上以指尖在空间内的运动轨迹曲线为路径进行模拟抓取。在实例过程中忽略物体的重量影响,根据生理习惯通过SolidWorks2015自带的配合功能设置轴体与虚拟手间的约束匹配,并通过干涉检查消除设置漏洞;本文考虑指节弯曲同步,开始抓取后,使手指按照运动轨迹方程与物体进行抓取匹配。本例中采用握姿,由轨迹方程知手指实现抓取与物体的尺寸及空间位置有关,输入位置和物体尺寸后,最终抓取操作实现如图5所示。
图5 基于运动轨迹的抓取实现 根据抓取规则3)和4)调整最终抓取姿态时,手指在目标体表面发生滑动,使轴体与人手实现更逼真的接触,避免了由于手指在抓取时根据运动轨迹方程快速到达抓取位置出现因视觉误差抓取失败的状态,最终准确抓取。由此可见,本实例通过提出的运动轨迹模型和抓取规则可成功实现“握”取姿势。 4 结论 在分析人手指运动特征的基础上,建立了指尖运动轨迹模型,能够根据物体本身决定手部最终抓取姿态,既能提高操作效率,又能在虚拟装配中减轻真实操作时的交互负担;创新性地提出了基于运动轨迹的抓取规则,以匹配构建的指尖运动曲线,保证抓取的有效性;通过实例对人手结构模型及其相应的抓取策略进行了验证与仿真,证明了本运动轨迹方程构建过程的有效性。在此基础上,期待可以对不规则和较大的物体抓取以及运动轨迹的多边性和双手操作问题进行研究,进一步完善轨迹规划。返回搜狐,查看更多 |



【本文地址】
今日新闻 |
推荐新闻 |