3D【24】PCA点云法向量估计 |
您所在的位置:网站首页 › 3d最小值3d最小值 › 3D【24】PCA点云法向量估计 |
3D【24】PCA点云法向量估计
|
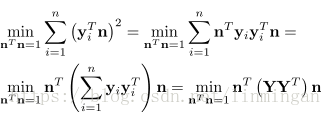
点云法向量的估计在很多场景都会用到,比如ICP配准,以及曲面重建。 基于PCA的点云法向量估计,其实是从最小二乘法推导出来的。假设我们要估计某一点的法向量,我们需要通过利用该点的近邻点估计出一个平面,然后我们就能计算出该点的法向量。或者可以这么说,通过最小化一个目标函数(要求的参数为法向量),使得该点与其每个近邻点所构成的向量与法向量的点乘为0,也就是垂直: 正常情况下,我们可以将点c看成是某一领域中所有点的中心点: m=1n∑i=1nXi m = 1 n ∑ i = 1 n X i同时: yi=Xi−m y i = X i − m这样,优化目标函数变为: 我们进一步对目标函数进行推导: 上面的优化目标函数等于: f(n)=nTSn其中,S=(YYT)min(f(n))s.t.nTn=1 f ( n ) = n T S n 其 中 , S = ( Y Y T ) m i n ( f ( n ) ) s . t . n T n = 1 其中, YYT Y Y T 是一个3×3的协方差矩阵,x,y,z坐标的协方差矩阵。 对于这种有约束的优化目标函数,我们可以用拉格朗日算法进行求解:

Sn=λn S n = λ n ?有没有很眼熟,其实就是线性代数里面的特征值和特征向量的相关公式。也即是, λ λ 是矩阵S的特征值,法向量是对应的特征向量。 所以法向量n的求解就是要对S进行向量分解。然后取特征值最小的特征向量作为求解的法向量。这个过程也就是PCA的一个标准求解过程,将每个邻域点与该邻域的中心点相减,得到一个n×3的矩阵。接着,用SVD对该矩阵进行分解,得到: Y=UΣV∗ Y = U Σ V ∗U中最后一列就是要求解的法向量n,也就是特征值最小的特征向量。 为什么是特征值最小的?我个人理解是:PCA的协方差矩阵的特征值越大,其特征向量就越能够描述数据的特征。越小就越不能区分样本之间的不同,也就是表征了数据中的共性。在我们的优化目标函数中,就是要为所有的邻域点寻找一个平面,使得所有的邻域点都在这个平面上,或者说所有点与该平面的距离最小,而不是而不是最大。而这个平面就是能够描述这些点的共性,即他们的法向量都一样。 也可以用另外一个求法,直接对协方差矩阵S,求解特征值和特征向量,然后取最小的特征值对应的特征向量。另外,也不一定用中心点m作为c,可以用点云中要求解法向量的顶点作为顶点c。 在求出法向量后还需要判断法向量的方向,一般来说法向量方向的矫正没有严格的数学公式可以使用。比较简单的方法是通过视点方向进行判断。比如我的视点方向是(0,0,1),那么求出来的法向量跟(0,0,1)进行点乘,如果小于0,就将法向量取反。更复杂的方法是使用最小生成树对法向量进行方向矫正。 |
【本文地址】