一文了解三种3D视觉技术 |
您所在的位置:网站首页 › 3dmax中物体移动不了 › 一文了解三种3D视觉技术 |
一文了解三种3D视觉技术
|
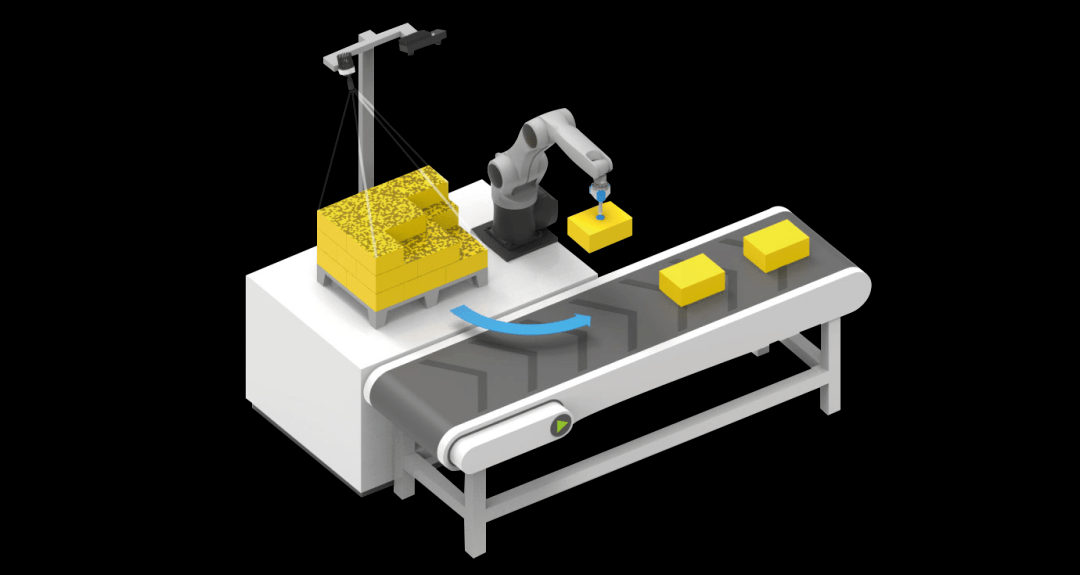
在托盘中的包装用伪色显示的3D点云 2 \ 双目视觉/ 双目视觉的工作原理与人眼类似。其3D原理是使用两台2D相机从不同视角拍摄同步的图像,从而获得深度信息。为了计算3D数据,必须知道两台相机之间的相对位置(外部参数)。此外,还需要获得有关每台相机的内部参数信息,例如镜头的光学中心和焦距等,这些信息共同决定了特定于相机的校准值。为了计算深度信息,首先需要校正两个2D相机拍摄的图像,然后使用适配算法在左右图像中搜索相应的像素,最后借助校准值,就可以将场景或物体的深度图像生成为点云。此过程中的最佳工作距离具体取决于两台相机的距离和设置角度,因此会各不相同。 对于结构简单的表面,由于双目视觉方法在两个图像中拍摄到的相应特征不足,因此无法从中计算出三维信息,用户可以通过搭配结构光克服这些限制。
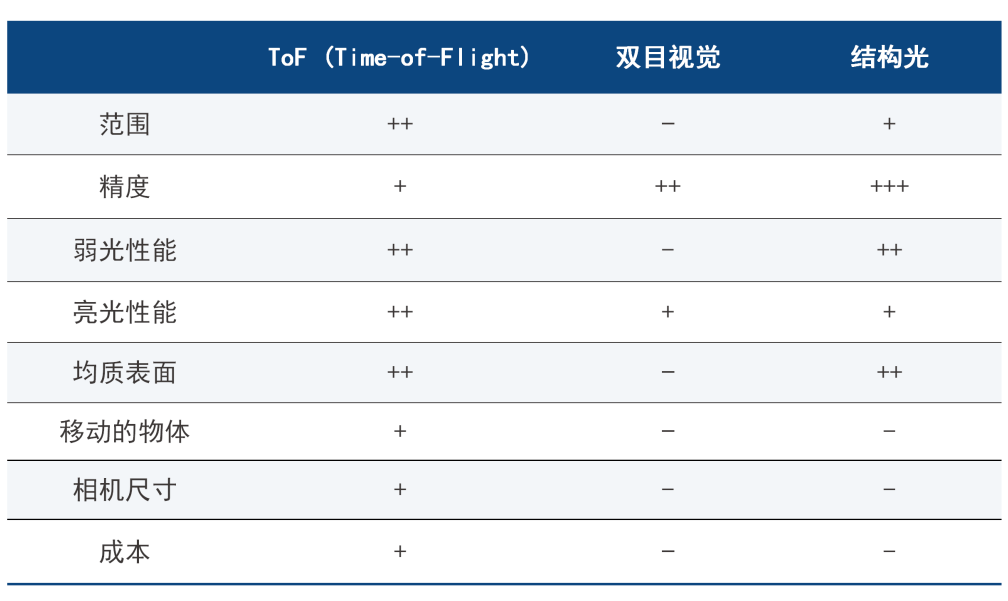
3 \ 结构光/ 与双目视觉技术不同,结构光技术需要将其中一台相机替换为条纹光投影仪。它会投影具有正弦强度曲线的各种条纹状图案,从而在表面上创建系统已知的人造结构。在表面上投影的条纹变形可用于计算3D信息,并获得更准确的测量结果。 具备结构光功能的芯片在近距离内可实现较高的精度。使用结构光方法时会产生很高的计算负载,它需要逐张采集和分析多个图像,不适用于移动的物体。综上,它仅适用于有限范围内的实时应用,否则需要投入更高的成本。 // 三者优劣势分析 //
典型应用 1 \ 典型ToF应用 / 在 工作距离长、测量范围大、高速运作以及系统复杂性低的应用中,ToF技术尤其可以发挥所长,而极高的精度则不是重要的考虑因素。 ● 测量物体(体积、形状、位置、方向) ● 工厂自动化:查找、拾取、组装物体;检测损坏的物体或堆垛错误 ● 机器人:确定机器人的拾取点;传送带上的抓取任务、箱盒取物、拾取与放置 ● 物流:包装、堆垛、打(拆)托盘、打标签、自动驾驶车辆(导航、安全警告) ● 医学:病人的定位和监测
2 \ 双目视觉和结构光的典型应用/ 双目视觉技术可以提供较高测量精度,而具备结构光功能的相机性能更胜一筹。这些类型的3D相机适用于检测结构较少的平扁表面,或需要实现较高测量精度的应用。 ● 确定位置和方向 ● 对物体进行高精度测量(体积、形状、位置、方向) ● 机器人:箱盒取物、导航、防撞、装货和卸货服务 ● 物流:室内车辆导航、机器的装卸、打(拆)托盘 ● 户外:测量和检测树干 ● 损坏检测等组件检测
转自:Basler计算机视觉 本文仅作技术信息交流,如有侵权,请联系删除。 end返回搜狐,查看更多 |




【本文地址】