HBU |
您所在的位置:网站首页 › 11pro比较11 › HBU |
HBU
|
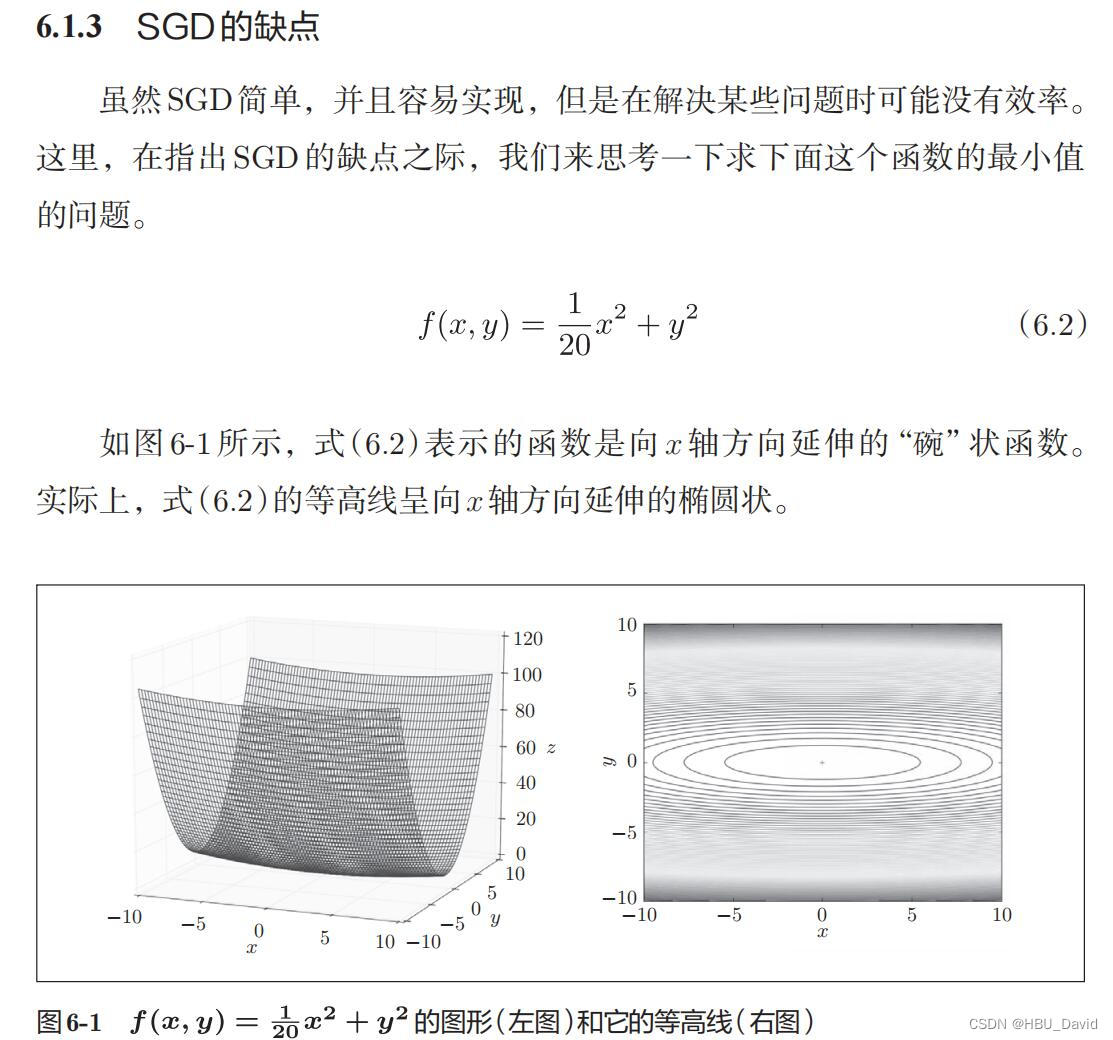
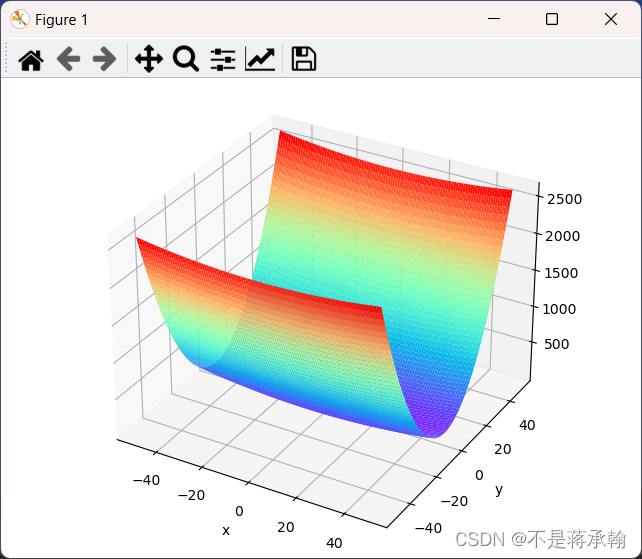
目录 1. 编程实现图6-1,并观察特征 2. 观察梯度方向 3. 编写代码实现算法,并可视化轨迹 4. 分析上图,说明原理 1、为什么SGD会走“之字形”?其它算法为什么会比较平滑? 2、Momentum、AdaGrad对SGD的改进体现在哪里?速度?方向?在图上有哪些体现? 3、仅从轨迹来看,Adam似乎不如AdaGrad效果好,是这样么? 4、四种方法分别用了多长时间?是否符合预期? 5、调整学习率、动量等超参数,轨迹有哪些变化? 5. 总结SGD、Momentum、AdaGrad、Adam的优缺点 6. Adam这么好,SGD是不是就用不到了? 7. 增加RMSprop、Nesterov算法。 8. 基于MNIST数据集的更新方法的比较 总结 1. 编程实现图6-1,并观察特征
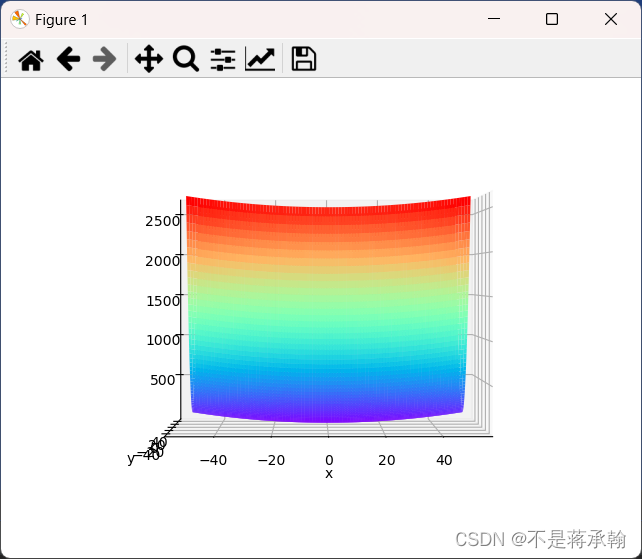
这个函数最底下是一条弧线,所以有全局最小值。 2. 观察梯度方向
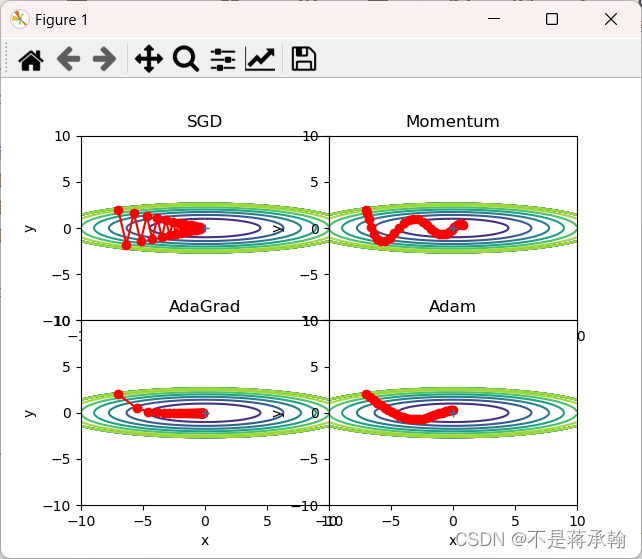
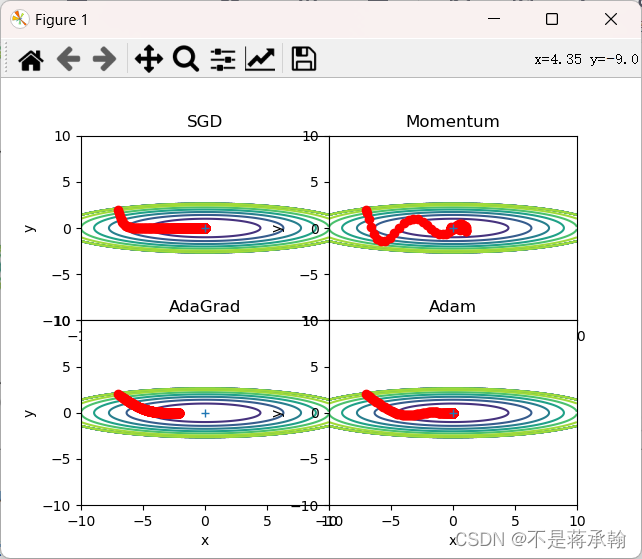
由于函数底部的那条弧线弧度很小,所以梯度下降方向基本是沿着y轴方向,x轴方向只占很小一部分,很多地方都梯度也没有指向(0,0)处。 3. 编写代码实现算法,并可视化轨迹
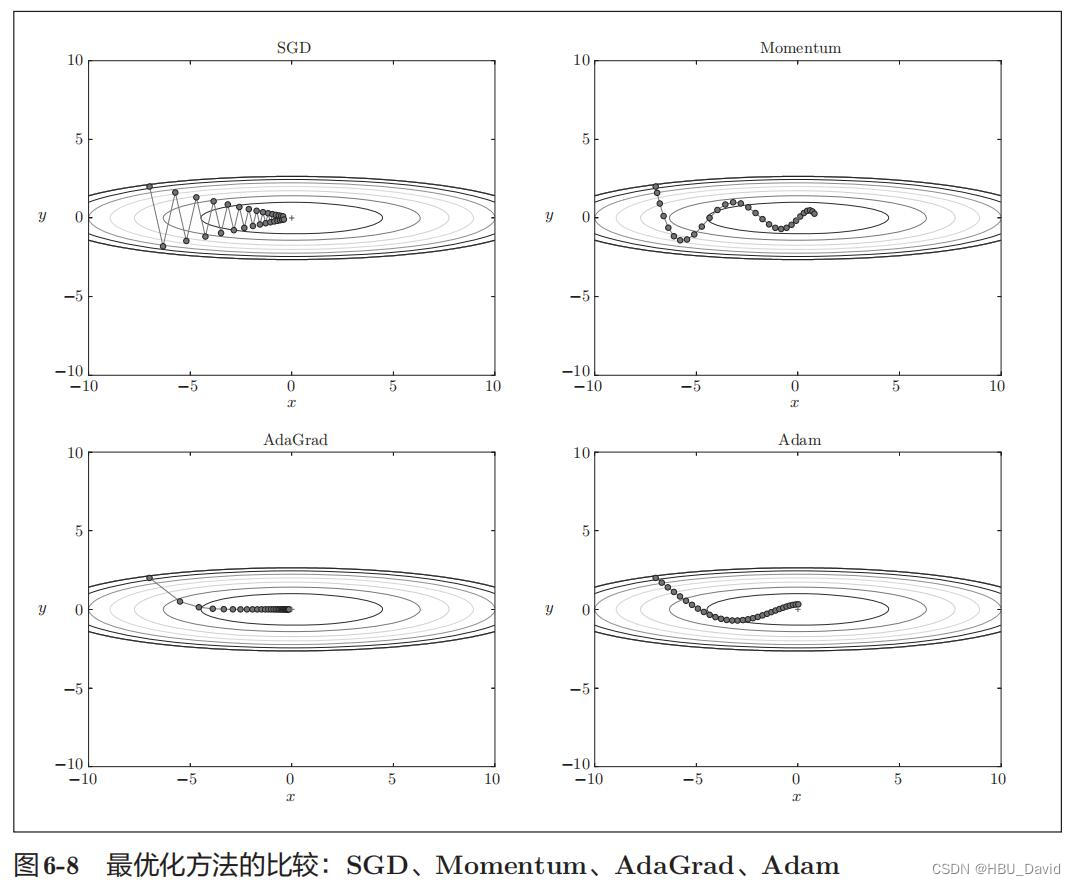
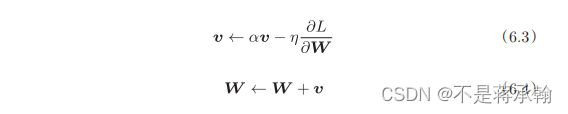
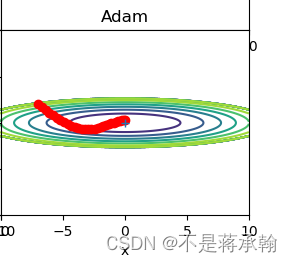
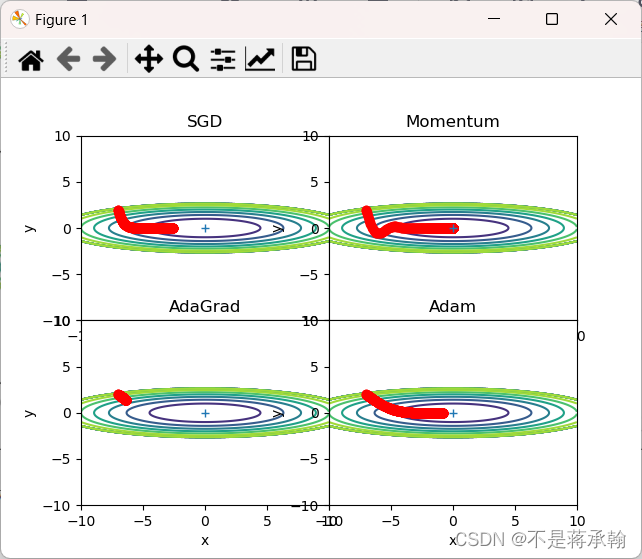
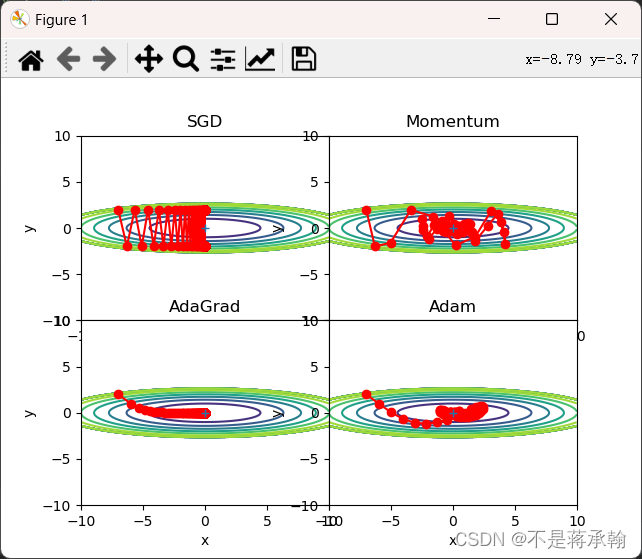
根据使用的方法不同,参数更新的路径也不同。只看这个图的话,AdaGrad似乎是最好的,不过也要注意,结果会根据要解决的问题而变。并且,很显然,超参数(学习率等)的设定值不同,结果也会发生变化。 那么用哪种方法好呢?非常遗憾,(目前)并不存在能在所有问题中都表现良好的方法。这4种方法各有各的特点,都有各自擅长解决的问题和不擅长解决的问题。 很多研究中至今仍在使用SGD。Momentum和AdaGrad也是值得一试的方法。最近,很多研究人员和技术人员都喜欢用Adam。 4. 分析上图,说明原理 1、为什么SGD会走“之字形”?其它算法为什么会比较平滑?SGD呈“之”字形移动。这是一个相当低效的路径。也就是说, SGD的缺点是,如果函数的形状非均向(anisotropic),比如呈延伸状,搜索 的路径就会非常低效。因此,我们需要比单纯朝梯度方向前进的SGD更聪 明的方法。SGD低效的根本原因是,梯度的方向并没有指向最小值的方向。 2、Momentum、AdaGrad对SGD的改进体现在哪里?速度?方向?在图上有哪些体现?Momentum是“动量”的意思,和物理有关。用数学式表示Momentum方 法,如下所示。
和前面的SGD一样,W表示要更新的权重参数, 表示损失函数关 于W的梯度,η表示学习率。这里新出现了一个变量v,对应物理上的速度。 式(6.3)表示了物体在梯度方向上受力,在这个力的作用下,物体的速度增 加这一物理法则。如图6-4所示,Momentum方法给人的感觉就像是小球在 地面上滚动。
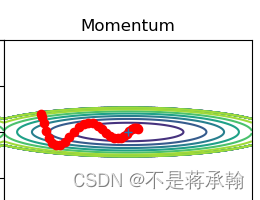
上图中,更新路径就像小球在碗中滚动一样。和SGD相比,我们发现 “之”字形的“程度”减轻了。这是因为虽然x轴方向上受到的力非常小,但是一直在同一方向上受力,所以朝同一个方向会有一定的加速。反过来,虽然y轴方向上受到的力很大,但是因为交互地受到正方向和反方向的力,它们会互相抵消,所以y轴方向上的速度不稳定。因此,和SGD时的情形相比,可以更快地朝x轴方向靠近,减弱“之”字形的变动程度。 AdaGrad会为参数的每个元素适当地调整学习率,与此同时进行学习 (AdaGrad的Ada来自英文单词Adaptive,即“适当的”的意思)。下面,让我们用数学式表示AdaGrad的更新方法。
和前面的SGD一样,W表示要更新的权重参数,
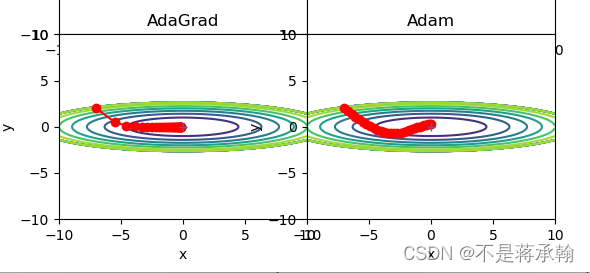
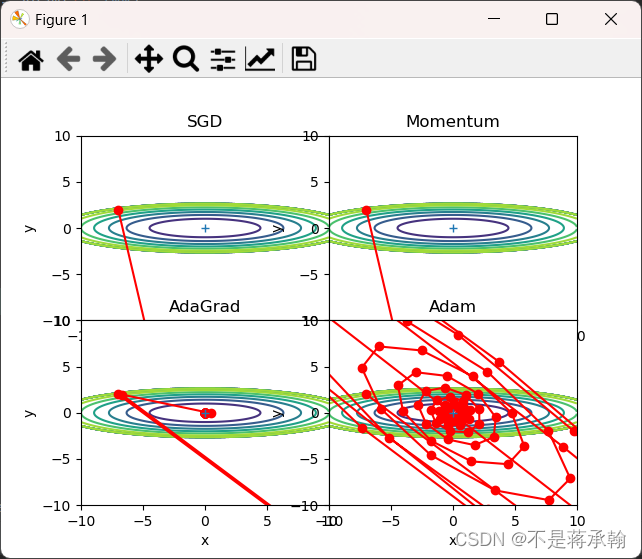
由上图的结果可知,函数的取值高效地向着最小值移动。由于y轴方 向上的梯度较大,因此刚开始变动较大,但是后面会根据这个较大的变动按 比例进行调整,减小更新的步伐。因此,y轴方向上的更新程度被减弱,“之” 字形的变动程度有所衰减。 3、仅从轨迹来看,Adam似乎不如AdaGrad效果好,是这样么?
从轨迹来看,好像是这样,主要有以下两点原因: 1、Adam可能不收敛 AdaGrad的二阶动量不断累积,单调递增,因此学习率是单调递减的。因此,这会使得学习率不断递减,最终收敛到0,模型也得以收敛。 但Adam则不然。二阶动量是固定时间窗口内的累积,随着时间窗口的变化,遇到的数据可能发生巨变,使得 2、Adam可能错过全局最优解 深度神经网络往往包含大量的参数,在这样一个维度极高的空间内,非凸的目标函数往往起起伏伏,拥有无数个高地和洼地。有的是高峰,通过引入动量可能很容易越过;但有些是高原,可能探索很多次都出不来,于是停止了训练。 4、四种方法分别用了多长时间?是否符合预期?从上往下依次是SGD,Momentum,AdaGrad,Adam的运行时间
可以看出,Adam因其算法复杂度而运行时间最长,其他三种算法时间差不多。 5、调整学习率、动量等超参数,轨迹有哪些变化?lr=0.01时:
lr太小,30次根本不够搜索的,改为1000次
这次Momentum找到了最小点,Adam马上找到,而其他两种算法还差得多 lr=0.1,搜索1000次 只有AdaGrad没有找到最小点 lr=1,搜索1000次
lr=100,搜索100次 可以发现,SGD和Momentum很容易错过全局最小值,Adam需要较长的时间和较多的搜索次数来找到全局最小值,AdaGrad效果最好。 5. 总结SGD、Momentum、AdaGrad、Adam的优缺点SGD: 选择合适的learning rate比较困难 - 对所有的参数更新使用同样的learning rate。对于稀疏数据或者特征,有时我们可能想更新快一些对于不经常出现的特征,对于常出现的特征更新慢一些,这时候SGD就不太能满足要求了。 SGD容易收敛到局部最优,并且在某些情况下可能被困在鞍点 Momentum: 下降初期时,使用上一次参数更新,下降方向一致,乘上较大的 下降中后期时,在局部最小值来回震荡的时候, 在梯度改变方向的时候, Adagrad : 前期 后期 适合处理稀疏梯度 由公式可以看出,仍依赖于人工设置一个全局学习率
中后期,分母上梯度平方的累加将会越来越大,使 Adam: 结合了Adagrad善于处理稀疏梯度和RMSprop善于处理非平稳目标的优点 对内存需求较小 为不同的参数计算不同的自适应学习率 也适用于大多非凸优化 - 适用于大数据集和高维空间 6. Adam这么好,SGD是不是就用不到了?参考:Adam那么棒,为什么还对SGD念念不忘 (2)—— Adam的两宗罪_gukedream的博客-CSDN博客 先来看SGD。SGD没有动量的概念,也就是说:
计算当前时刻的下降梯度: 可以看到下降梯度就是最简单的 SGD没有用到二阶动量,因此学习率是恒定的(实际使用过程中会采用学习率衰减策略,因此学习率递减)。AdaGrad的二阶动量不断累积,单调递增,因此学习率是单调递减的。因此,这两类算法会使得学习率不断递减,最终收敛到0,模型也得以收敛。 但AdaDelta和Adam则不然。二阶动量是固定时间窗口内的累积,随着时间窗口的变化,遇到的数据可能发生巨变,使得 Adam很可能错过全局最优解 深度神经网络往往包含大量的参数,在这样一个维度极高的空间内,非凸的目标函数往往起起伏伏,拥有无数个高地和洼地。有的是高峰,通过引入动量可能很容易越过;但有些是高原,可能探索很多次都出不来,于是停止了训练。 近期Arxiv上的两篇文章谈到这个问题。 第一篇就是前文提到的吐槽Adam最狠的 The Marginal Value of Adaptive Gradient Methods in Machine Learning 。文中说到,同样的一个优化问题,不同的优化算法可能会找到不同的答案,但自适应学习率的算法往往找到非常差的答案。他们通过一个特定的数据例子说明,自适应学习率算法可能会对前期出现的特征过拟合,后期才出现的特征很难纠正前期的拟合效果。 另外一篇是 Improving Generalization Performance by Switching from Adam to SGD,进行了实验验证。他们CIFAR-10数据集上进行测试,Adam的收敛速度比SGD要快,但最终收敛的结果并没有SGD好。他们进一步实验发现,主要是后期Adam的学习率太低,影响了有效的收敛。他们试着对Adam的学习率的下界进行控制,发现效果好了很多。 于是他们提出了一个用来改进Adam的方法:前期用Adam,享受Adam快速收敛的优势;后期切换到SGD,慢慢寻找最优解。这一方法以前也被研究者们用到,不过主要是根据经验来选择切换的时机和切换后的学习率。这篇文章把这一切换过程傻瓜化,给出了切换SGD的时机选择方法,以及学习率的计算方法,效果看起来也不错。 所以,谈到现在,到底Adam好还是SGD好?这可能是很难一句话说清楚的事情。去看学术会议中的各种paper,用SGD的很多,Adam的也不少,还有很多偏爱AdaGrad或者AdaDelta。可能研究员把每个算法都试了一遍,哪个出来的效果好就用哪个了。 而从这几篇怒怼Adam的paper来看,多数都构造了一些比较极端的例子来演示了Adam失效的可能性。这些例子一般过于极端,实际情况中可能未必会这样,但这提醒了我们,理解数据对于设计算法的必要性。优化算法的演变历史,都是基于对数据的某种假设而进行的优化,那么某种算法是否有效,就要看你的数据是否符合该算法的胃口了。 另一方面,Adam之流虽然说已经简化了调参,但是并没有一劳永逸地解决问题,默认参数虽然好,但也不是放之四海而皆准。因此,在充分理解数据的基础上,依然需要根据数据特性、算法特性进行充分的调参实验,找到自己炼丹的最优解。而这个时候,不论是Adam,还是SGD,于你都不重要了。 7. 增加RMSprop、Nesterov算法。 optimizers['RMSprop']=RMSprop(lr=0.2) optimizers['Nesterov']=Nesterov(lr=0.1)
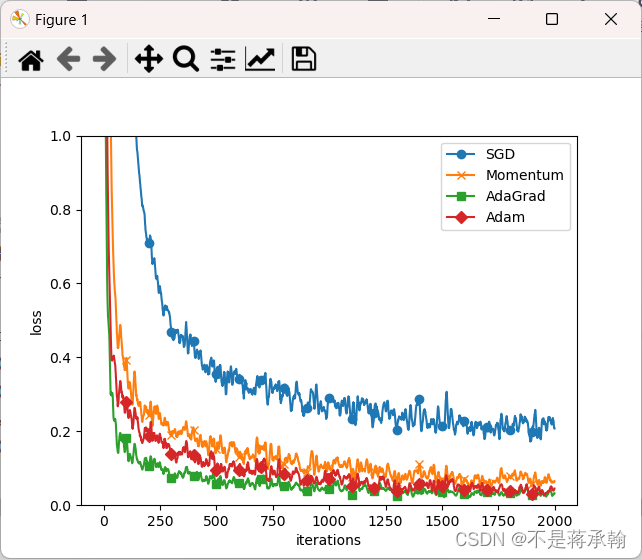
对比Momentum与Nesterov 两个算法都是动量优化法,Nesterov项是momentum的改进,在梯度更新时做一个校正,让之前的动量直接影响当前的动量,避免前进太快,同时提高灵敏度。 对比AdaGrad与RMSprop 两个都是自适应学习率优化法,RMSprop解决了对历史梯度一直累加而导致学习率一直下降的问题,适合处理非平稳目标,对于RNN效果很好,但RMSprop依然依赖于手动选择全局学习率。 8. 基于MNIST数据集的更新方法的比较 # coding: utf-8 import os import sys sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定 import matplotlib.pyplot as plt from dataset.mnist import load_mnist from common.util import smooth_curve from common.multi_layer_net import MultiLayerNet from common.optimizer import * # 0:读入MNIST数据========== (x_train, t_train), (x_test, t_test) = load_mnist(normalize=True) train_size = x_train.shape[0] batch_size = 128 max_iterations = 2000 # 1:进行实验的设置========== optimizers = {} optimizers['SGD'] = SGD() optimizers['Momentum'] = Momentum() optimizers['AdaGrad'] = AdaGrad() optimizers['Adam'] = Adam() #optimizers['RMSprop'] = RMSprop() networks = {} train_loss = {} for key in optimizers.keys(): networks[key] = MultiLayerNet( input_size=784, hidden_size_list=[100, 100, 100, 100], output_size=10) train_loss[key] = [] # 2:开始训练========== for i in range(max_iterations): batch_mask = np.random.choice(train_size, batch_size) x_batch = x_train[batch_mask] t_batch = t_train[batch_mask] for key in optimizers.keys(): grads = networks[key].gradient(x_batch, t_batch) optimizers[key].update(networks[key].params, grads) loss = networks[key].loss(x_batch, t_batch) train_loss[key].append(loss) if i % 100 == 0: print( "===========" + "iteration:" + str(i) + "===========") for key in optimizers.keys(): loss = networks[key].loss(x_batch, t_batch) print(key + ":" + str(loss)) # 3.绘制图形========== markers = {"SGD": "o", "Momentum": "x", "AdaGrad": "s", "Adam": "D"} x = np.arange(max_iterations) for key in optimizers.keys(): plt.plot(x, smooth_curve(train_loss[key]), marker=markers[key], markevery=100, label=key) plt.xlabel("iterations") plt.ylabel("loss") plt.ylim(0, 1) plt.legend() plt.show()
从结果中可知,与SGD相比,其他3种方法学习得更快,而且速度基本相同,仔细看的话,AdaGrad的学习进行得稍微快一点。这个实验需要注意的地方是,实验结果会随学习率等超参数、神经网络的结构(几层深等)的不同而发生变化。不过,一般而言,与SGD相比,其他3种方法可 以学习得更快,有时最终的识别精度也更高。 总结因为这部分内容在鱼书中是在RNN之前,所以在学RNN之前就读过了,就对参数更新优化算法有了一定了解,再加上上学期学的最优化方法,这次上课的内容对我来说就不是很难。 |




 能够进行很好的加速
能够进行很好的加速  , 使得更新幅度增大,跳出陷阱
, 使得更新幅度增大,跳出陷阱  能够减少更新 总而言之,momentum项能够在相关方向加速SGD,抑制振荡,从而加快收敛
能够减少更新 总而言之,momentum项能够在相关方向加速SGD,抑制振荡,从而加快收敛 较小的时候, regularizer较大,能够放大梯度
较小的时候, regularizer较大,能够放大梯度  较大的时候,regularizer较小,能够约束梯度
较大的时候,regularizer较小,能够约束梯度  设置过大的话,会使regularizer过于敏感,对梯度的调节太大
设置过大的话,会使regularizer过于敏感,对梯度的调节太大  ,使得训练提前结束
,使得训练提前结束 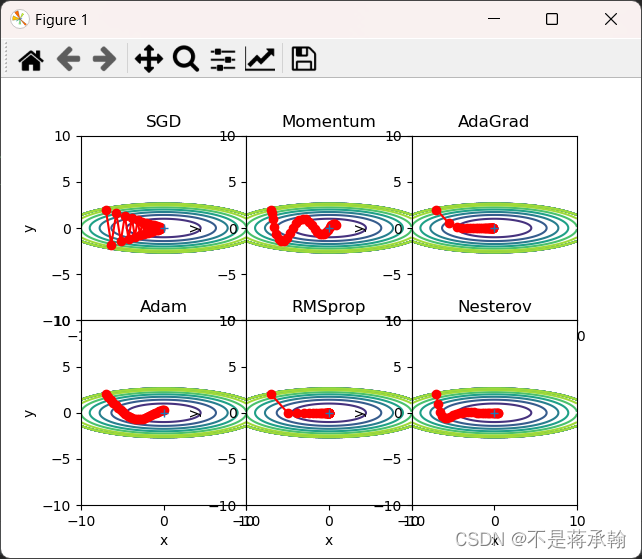
【本文地址】
今日新闻 |
推荐新闻 |