动态规划的优化 |
您所在的位置:网站首页 › 0-1规划问题例题 › 动态规划的优化 |
动态规划的优化
|
动态规划的优化
一、空间优化
说明
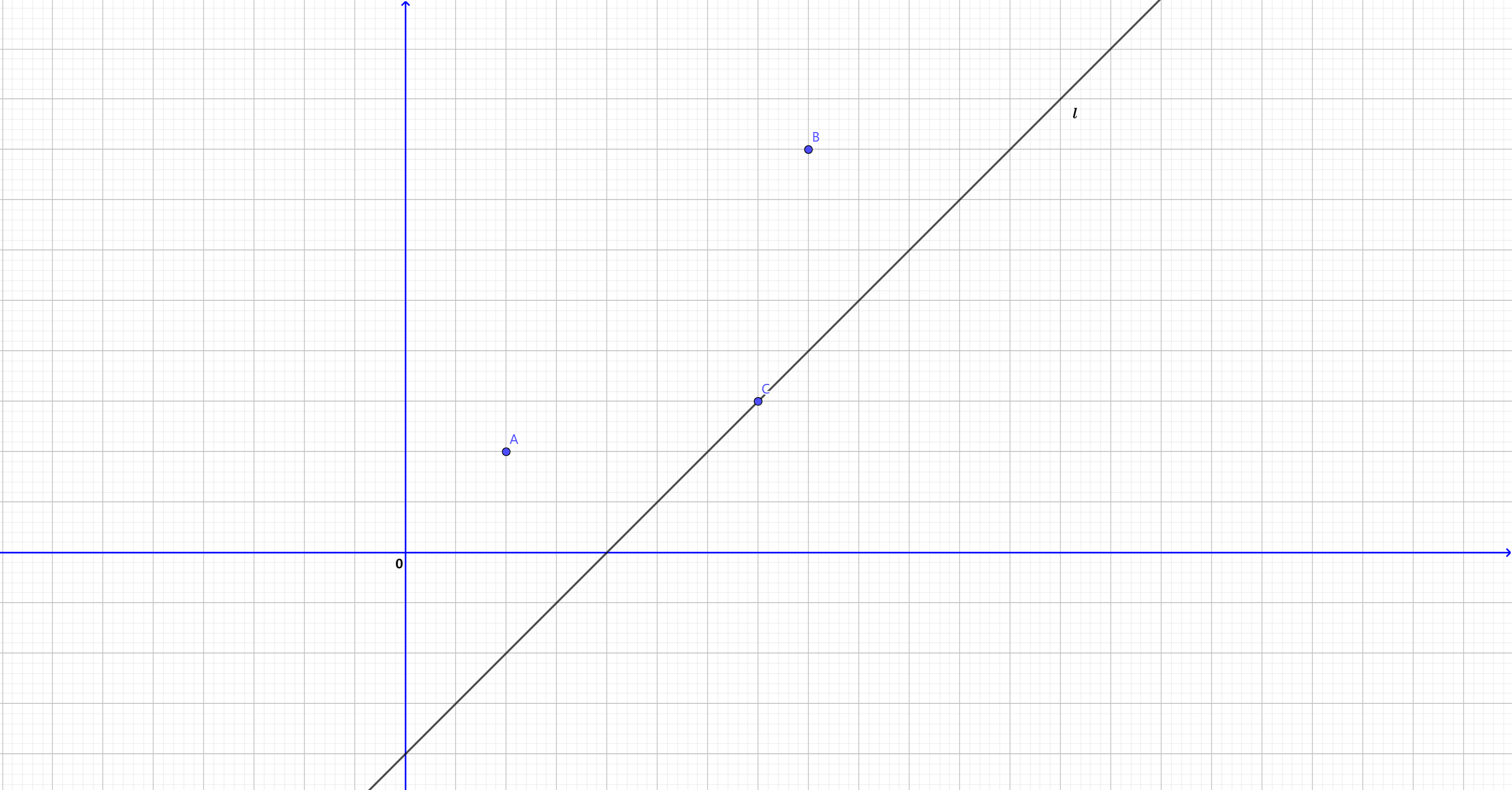
动态规划空间优化为滚动数组优化,即对于一个多维数组,转移时均是由上一阶段转移来的,则可以将这一维省略,以降低空间复杂度,但要注意转移时的顺序; 例题0 - 1 背包问题 题目有一个最多能装 m m m 千克的背包,有 n n n 件物品,它们的重量分别是 W 1 , W 2 , . . . , W n W_1,W_2,..., W_n W1,W2,...,Wn ,它们的价值分别是 C 1 , C 2 , . . . , C n C_1,C_2,... ,C_n C1,C2,...,Cn ; 若每种物品只有一件,问能装入的最大总价值; 分析 状态由于最终价值与物品与重量有关,所以可定义状态, d p [ i ] [ j ] dp[i][j] dp[i][j] 表示前 i i i 件物品装在容量为 j j j 的背包中所能装入的最大总价值; 转移依次遍历每一个物品与背包容量,比较取与不取当前物品的价值; 状态转移方程 d p [ i ] [ j ] = max { d p [ i − 1 ] [ j ] ( j < w [ i ] ) d p [ i − 1 ] [ j − w [ i ] ] + c [ i ] dp[i][j] = \max \begin{cases} dp[i- 1][j] \; (j < w[i]) \\ dp[i - 1][j - w[i]] + c[i] \end{cases} dp[i][j]=max{dp[i−1][j](jdp[i−1][0],dp[i−1][1]}dp[i][1]=j=i−kmaxi−1{dp[j][0]−sum[j]+sum[i]} 时间复杂度为 O ( N ∗ N ) O(N * N) O(N∗N) ,考虑优化; 对于 d p [ i ] [ 1 ] dp[i][1] dp[i][1] 的方程,可将 s u m [ i ] sum[i] sum[i] 提出,得 d p [ i ] [ 1 ] = max j = i − k i − 1 { d p [ j ] [ 0 ] − s u m [ j ] } + s u m [ i ] } dp[i][1] = \max_{j = i - k}^{i - 1}\{dp[j][0] − sum[j]\} + sum[i]\} dp[i][1]=maxj=i−ki−1{dp[j][0]−sum[j]}+sum[i]} ,则可使用单调队列优化,维护一个递减单调队列; 依次遍历 n n n 个物品,若当前物品编号为 i i i 则, 先更新 d p [ i ] [ 0 ] dp[i][0] dp[i][0] 的值; 将单调队列存储的候选优解中下标不满足 j j j 范围的从单调队列中删除; 用单调队列的队首元素更新 d p [ i ] dp[i] dp[i] 的值; 将下标 i i i 存入单调队列中,但为维护单调队列的单调性,应先将单调队列队尾元素中 d p dp dp 值小于 d p [ i ] dp[i] dp[i] 的元素从队列中删除,再将下标 i i i 存入单调队列; 代码 #include #include #define MAXN 100005 using namespace std; int n, k; long long a[MAXN], sum[MAXN], dp[MAXN][2]; int q[MAXN], head = 1, tail = 1; // 单调队列 int main() { scanf("%d %d", &n, &k); for (int i = 1; i } 中,用单调队列维护 d p [ j ] + p ( j ) dp[j] + p(j) dp[j]+p(j) 的值;所以在上述 1D/1D 的动态规划中,多项式 v a l ( i , j ) val(i, j) val(i,j) 是否能且仅能拆分为存在 q ( i ) , p ( j ) q(i), p(j) q(i),p(j) 两个部分是能否使用单调队列优化的基本条件; 即 d p dp dp 状态转移方程形如 d p [ i ] = min j = L ( i ) R ( i ) { d p [ j ] + q ( i ) + p ( j ) } dp[i] = \min_{j = L(i)}^{R(i)}\{dp[j] + q(i) + p(j)\} dp[i]=minj=L(i)R(i){dp[j]+q(i)+p(j)} 可用单调队列优化; 三、斜率优化 说明在 1D/1D 的动态规划中,多项式 v a l ( i , j ) val(i, j) val(i,j) 若能拆分成 q ( i ) + p ( j ) + a ( i ) ∗ b ( j ) q(i) + p(j) + a(i) * b(j) q(i)+p(j)+a(i)∗b(j) 即可以使用动态规划的斜率优化; 其中, q ( i ) , a ( i ) q(i), a(i) q(i),a(i) 仅与 i i i 有关, p ( j ) , b ( j ) p(j), b(j) p(j),b(j) 仅与 j j j 有关; 即 d p dp dp 状态转移方程形如 d p [ i ] = min j = L ( i ) R ( i ) { d p [ j ] + q ( i ) + p ( j ) + a ( i ) ∗ b ( j ) } dp[i] = \min_{j = L(i)}^{R(i)}\{dp[j] + q(i) + p(j) + a(i) * b(j)\} dp[i]=minj=L(i)R(i){dp[j]+q(i)+p(j)+a(i)∗b(j)} 可用斜率优化; 即可继续方程式变形, d p [ i ] = d p [ j ] + q ( i ) + p ( j ) + a ( i ) ∗ b ( j ) d p [ j ] + p ( j ) = − a ( i ) ∗ b ( j ) + d p [ i ] + q ( i ) \begin{aligned} dp[i] &= dp[j] + q(i) + p(j) + a(i) * b(j) \\ dp[j] + p(j) &= -a(i) * b(j) + dp[i] + q(i) \\ \end{aligned} dp[i]dp[j]+p(j)=dp[j]+q(i)+p(j)+a(i)∗b(j)=−a(i)∗b(j)+dp[i]+q(i) 变形为 y = k x + b y = kx + b y=kx+b 的样式,其中 d p [ j ] + p ( j ) dp[j] + p(j) dp[j]+p(j) 即为 y y y , b ( j ) b(j) b(j) 即为 x x x, − a ( i ) -a(i) −a(i) 即为 k k k , d p [ i ] + q ( i ) dp[i] + q(i) dp[i]+q(i) 即为 b b b ; 则平面直角坐标系的一个点 ( b ( j ) , d p [ j ] + p ( j ) ) (b(j), dp[j] + p(j)) (b(j),dp[j]+p(j)) 仅与 j j j 有关,整个 d p dp dp 是一条直线,其斜率为 − a ( i ) -a(i) −a(i) ,截距为 d p [ i ] + q ( i ) dp[i] + q(i) dp[i]+q(i) ,由于要求 d p [ i ] dp[i] dp[i] 最小,则应让一条过点 ( b ( j ) , d p [ j ] + p ( j ) ) (b(j), dp[j] + p(j)) (b(j),dp[j]+p(j)) 的直线截距 d p [ i ] + q ( i ) dp[i] + q(i) dp[i]+q(i) 最小; 由于在求解 d p [ i ] dp[i] dp[i] 值时, − a ( i ) -a(i) −a(i) 仅与 i i i 有关,所以可以将其看作一个定值; 即求过点 ( b ( j ) , d p [ j ] + p ( j ) ) (b(j), dp[j] + p(j)) (b(j),dp[j]+p(j)) 的斜率为 − a ( i ) -a(i) −a(i) 的直线的截距 d p [ i ] + q ( i ) dp[i] + q(i) dp[i]+q(i) 最小; 若图上的每个点均为一个 j j j 所对应的点,直线为 l l l ,则此时情况为,
则点 C C C 即为 d p [ i ] dp[i] dp[i] 对应的最优的 d p [ j ] dp[j] dp[j] ; 则此时可以发现, A , B , C A, B, C A,B,C 三个点共同组成了一个下凸包,即 K l ( A , C ) < K l ( C , B ) K_{l(A, C)} < K_{l(C, B)} Kl(A,C) |
【本文地址】
今日新闻 |
推荐新闻 |